👩💻 IoT (Embedded)/Arduino
[아두이노] 아날로그 신호 - 초음파 센서
징징알파카
2023. 3. 29. 23:24
728x90
반응형
<본 블로그는 엘리스 IoT 1를 참고해서 공부하며 작성하였습니다 :-)>
(코드는 저작권상 공유 안됩니당!!)
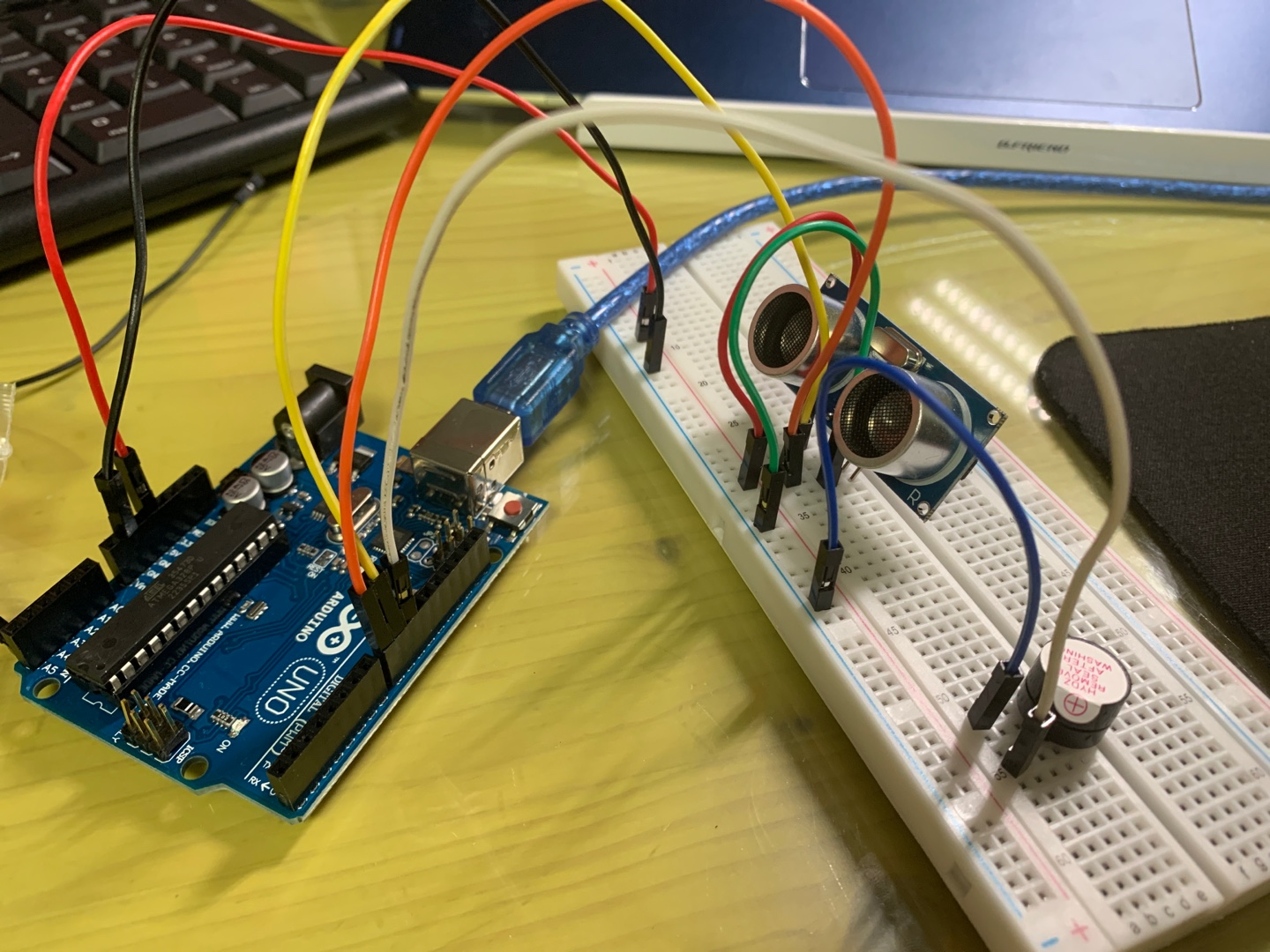
🥑 초음파 센서
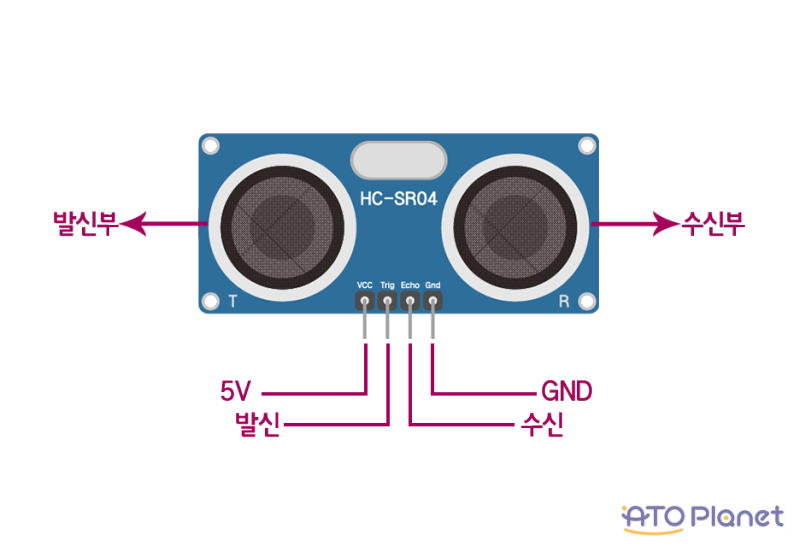
: 초음파를 이용해 거리를 측정하는 센서
: 초음파를 송신하여 물체에 부딪혀서 돌아온 시간으로 거리를 산출하는 원리
=> 초음파 송신 부분에서 초음파 펄스 출력
=> 물체에 부딪혀 돌아온 신호를 에코 수신 부분에서 받음
=> 물체에 부딪혀 돌아온 시간 차로 물체와의 거리 계산
거리 (cm) = 시간 (us) X 0.017(cm/us)
초음파 속도가 340 m/s 인데 왕복이니까 170 m/s, m에서 cm/us 로 바뀌니까 0.017
거리 측정 : 2cm~4cm
측정 가능한 각도 : 약 15도
초음파 속도 : 340 m/s
🍔 마이크로초 (us) 시간만큼 그 상태로 유지/동작 중지 (1ms = 1000us)
delayMicroseconds(us);
🍔 수신핀의 상태가 특정 상태가 될 때까지의 시간을 측정하여 us 단위로 반환
: 수신핀의 상태가 특정 상태 (HIGH, LOW) 일 때까지의 시간 측정
pulseIn(수신핀, 특정상태);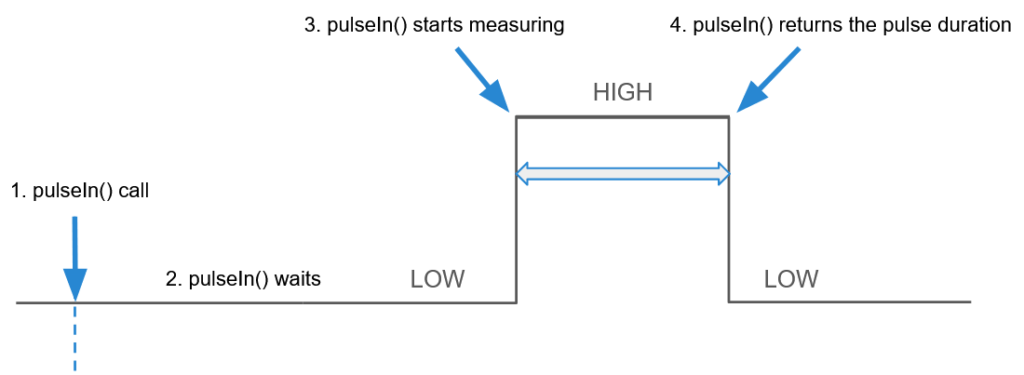
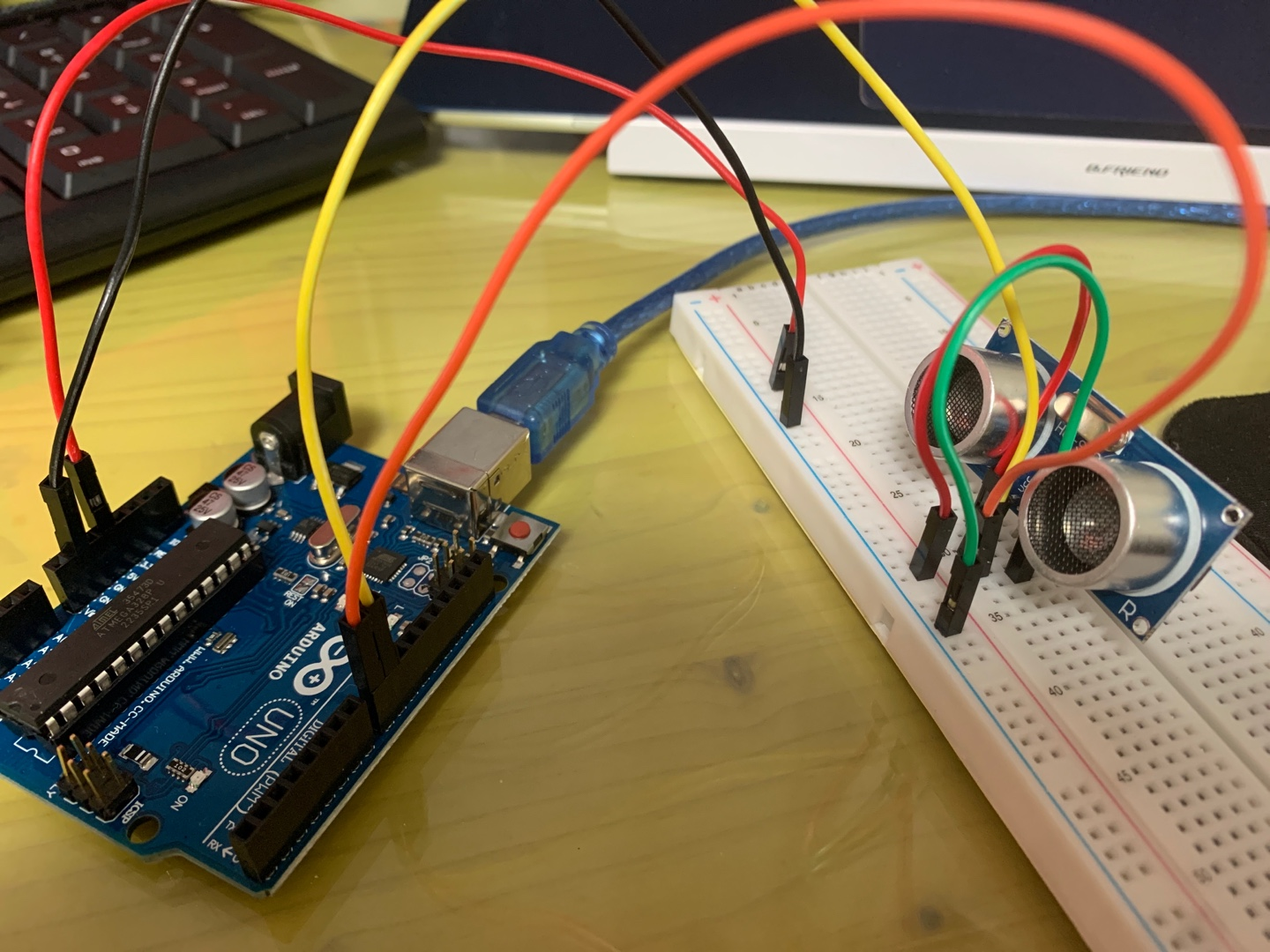
🥑 초음파 센서로 주차 공간 알림 장치
: 주차 공간에 초음파 센서를 설치하고 물체가 있는지 없는지에 따라 LED의 색깔을 바꿔주면 간단하게 주차 공간 알림 장치
주차 공간이 차 있으면, RGB LED를 빨간색으로 점등
주차 공간이 차 있지 않으면, 파란색으로 점등
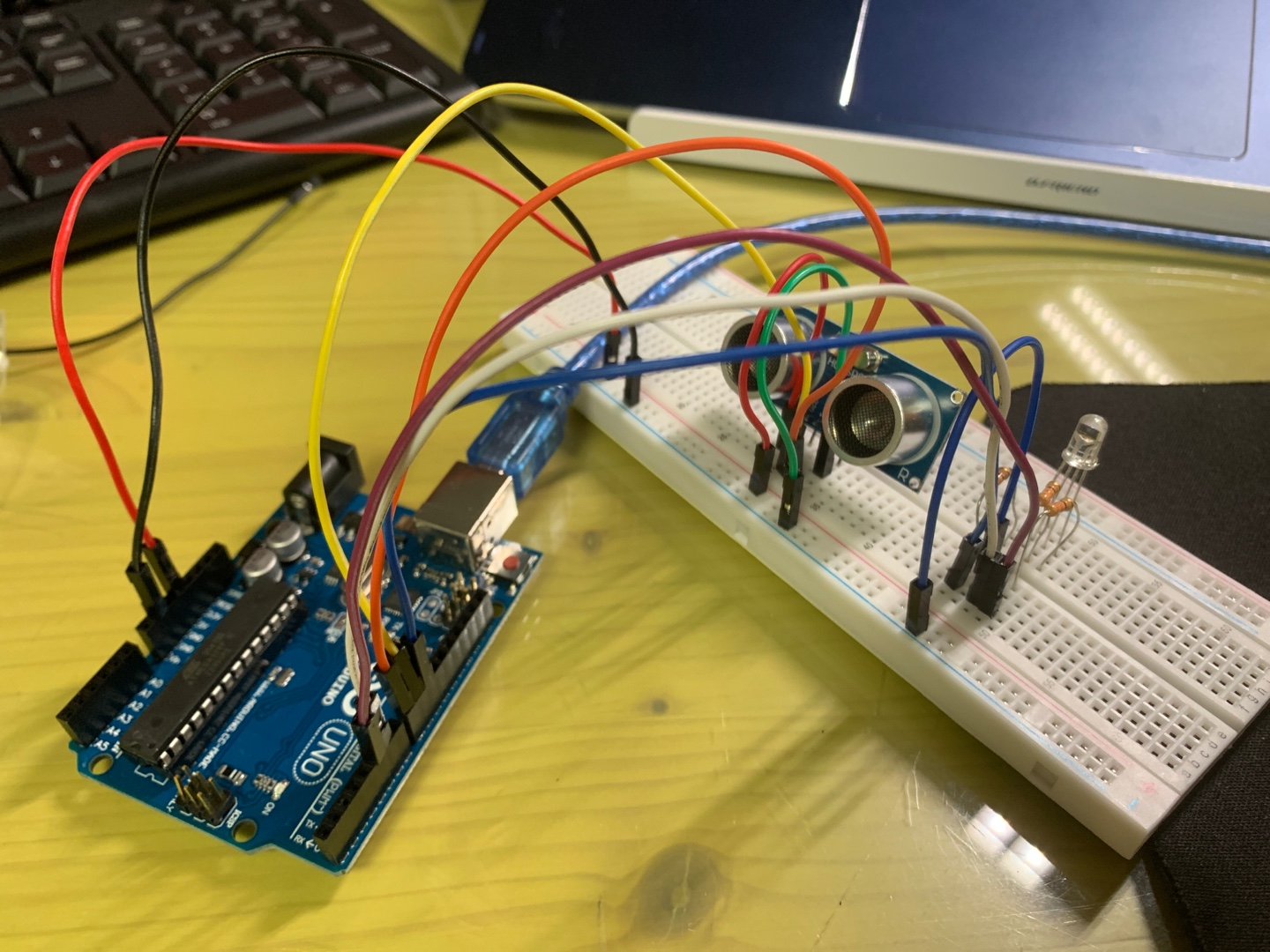
🥑 초음파 센서로 자동차 후방 감지기 만들기
: 초음파 센서와 피에조 부저를 활용하여 장애물이 감지되면 경고음을 출력하는 자동차 후방 감지기
초음파 센서를 이용해서 장애물이 감지되면 경고음을 발생 (장애물 감지 기준은 물체와의 거리가 30cm 이하)
장애물과의 거리가 가까워지면 가까워질수록 경고음 간격을 짧게 출력
장애물과의 거리가 위험 수위(10cm 이하)에 다다르면 경고음을 길게 출력
728x90
반응형