[아두이노] 멀티 태스킹 하기 - millis() & 인터럽트 & 타이머
<본 블로그는 엘리스 IoT 1를 참고해서 공부하며 작성하였습니다 :-)>
(코드는 저작권상 공유 안됩니당!!)
🥑 delay 없이 작업 수행
: 원래 작업 다음에 delay 주고 loop 내에 구성하면 주기적으로 작업 수행 가능
🍔 millis() 함수
unsigned long time = millis();: 아두이노가 프로그램을 시작한 뒤 경과된 시간을 ms 단위로 변환
: delay 없이 주기적인 동작 수행 가능
: 시간 경과 조건 만족할 때만 작업 수행함
🥑 아두이노 멈추지 말기
: 멈추지 않고 LED를 깜빡이기 위해 millis 함수를 활용하기
🥑 인터럽트
: 실행 중인 프로그램에서 즉시 처리해야 할 프로그램이 발생되는 것
: 실행 중인 프로그램을 중단하고 즉시 실행해야 할 프로그램 수행
// 인터럽트가 발생했을 때 실행될 callback 함수
attachInterrupt(interrupt, callback, mode);
// 인터럽트가 발생했을 때 수행할 callback 함수 지정
void callback();
🍔 인터럽트 시그널
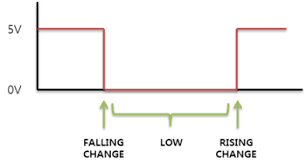
LOW : 입력 값 LOW
CHANGE : 입력 값 상태 변할 때
RISING : 입력 값이 LOW 에서 HIGH
FALLING : 입력 값이 HIGH 에서 LOW
🥑 즉각 반응하는 그린 라이트
: 파란 LED는 1초마다 깜빡이고 버튼을 누르면 녹색 LED가 즉각 점등하기
🥑 타이머
: 아두이노 컨트롤러에 내장된 하드웨어의 한 구성요소
: Timer 0, Timer1, Timer2 3개의 타이머 있음
🍔 TimerOne 라이브러리
// Timer1 에 시간 간격 설정
Timer1.initialize(1000);
// 시간 만료되면 수행할 callback 함수 등록
Timer1.attachInterrupt(callback);
🍔 Timer-master 라이브러리
: millis() 함수 활용해서 폴링 방식으로 타이머 구현
폴링 - 어떤 특정한 사건이 발생했는지 반복적으로 검사, 지정한 동작을 수행하는 것
#import "Timer.h"
// Timer 객체 생성
Timer t;
// pin 상태를 매 interval 마다 반전
t.oscillate(pin, interval, signal);
// 매 interval 마다 callback 함수 실행
t.every(interval, callback);
// 타이머 이벤트와 관련된 모든 기능을 수행하는 함수로 loop 내 꼭 호출
t.update();
🍔 위치독 타이머(WDT, Watchdog Timer)
: 시스템을 통제할 수 없는 예외가 발생하면 자동으로 시스템을 리셋
🥑 타이머를 바꿔주세요
: 두 개의 LED 를 각각 다른 주기 (1000ms, 700ms)로 깜빡이도록 동작
: Timer 1을 소프트웨어로 구현된 타이머 라이브러리(Timer-master)를 활용하도록 바꾸기