👩💻 IoT (Embedded)/Arduino
[BSS 안전하고 깨끗한 지하철 탑승 및 운행 최종] Station (낙상사고, 스크린 도어 고장, 지하철 내 Co2 농도 시각화)
징징알파카
2023. 12. 22. 10:40
728x90
반응형
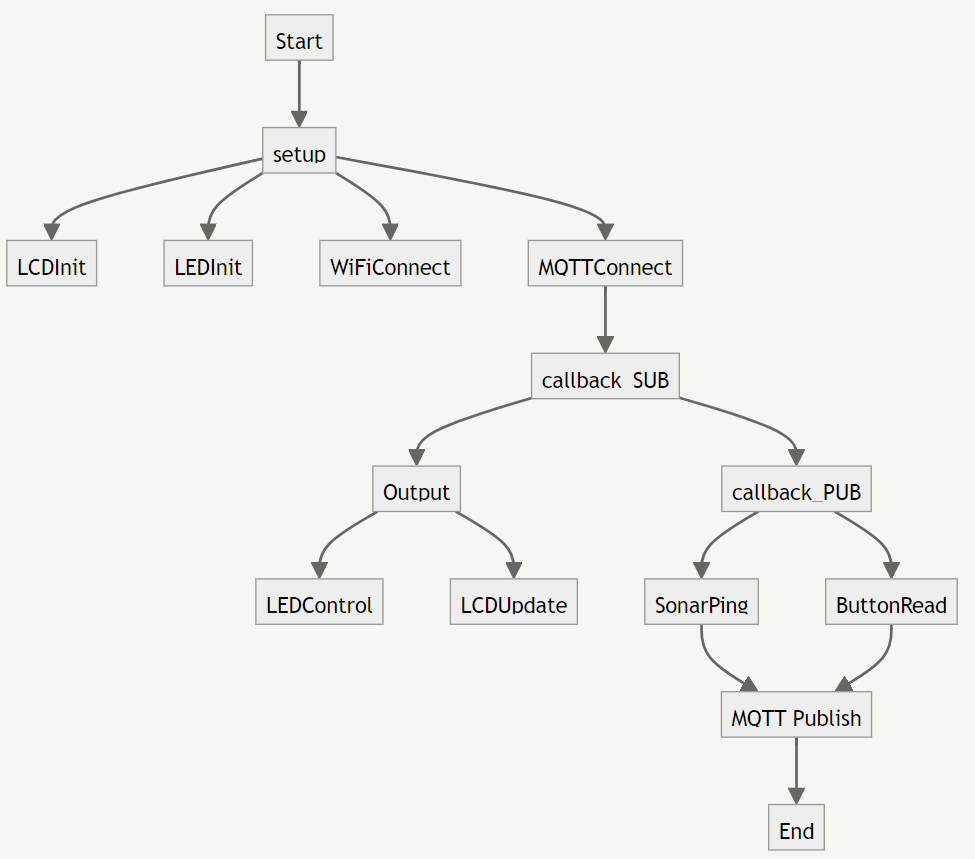
⭐ Station
🚩 sub
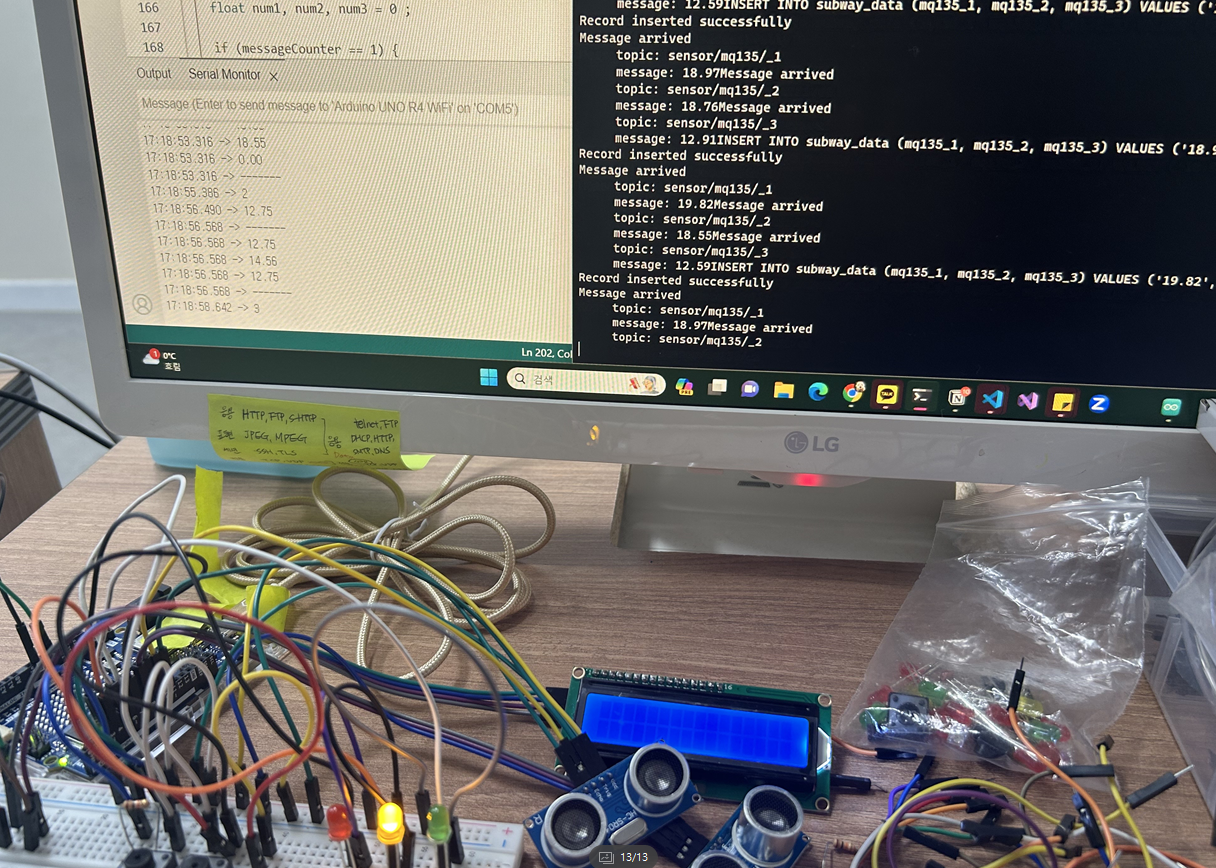
MQ135 (Co2 가스 측정 센서) 3 개의 값들을 topic 별로 받아서 LCD 로 출력하기
🚩 pub
초음파 센서 2개로 거리를 측정하며 낙상 여부를 알림 -> 이를 기관사에게 pub 로 전송
버튼 2개로 스크린 도어 고장 (0, 1) 을 가정하여 고장 여부를 알림 -> 이를 기관사에게 pub 로 전송
⭐ MQ135_SUB & Door_Button_PUB
#include "WiFiS3.h"
#include <PubSubClient.h>
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
#include <stdio.h>
#include <string.h>
#include <stdlib.h> // atof 함수가 선언된 헤더 파일
#include <NewPing.h>
// WiFi and MQTT 셋팅
#define WLAN_SSID "class924"
#define WLAN_PASS "kosta90009"
#define MQTT_SERVER "192.168.0.154"
#define MQTT_PORT 1883
// LCD 주소, 행, 렬 선언
#define LCD_ADDRESS 0x27
#define LCD_COLUMNS 16
#define LCD_ROWS 2
LiquidCrystal_I2C lcd(0x27, 16, 2);
// sonar(TrigPin, EchoPin, MaxDistance);
// TrigPin과 EchoPin과 최대제한거리(MaxDistance)의 값을 선언
NewPing sonar[2] = {
NewPing(9, 8, 50),
NewPing(11, 10, 50),
};
// LED
int RED = 3;
int YELLOW = 4;
int GREEN = 5;
WiFiClient ethClient;
PubSubClient mqtt(ethClient);
void callback_SUB(char* topic, byte* payload, unsigned int length);
void Output(String message, unsigned int messageCounter, unsigned int num);
void setup()
{
Serial.begin(9600);
// LCD
lcd.init();
lcd.clear();
lcd.backlight();
// button
pinMode(6, INPUT);
pinMode(7, INPUT);
// LED
pinMode(RED, OUTPUT);
pinMode(YELLOW, OUTPUT);
pinMode(GREEN, OUTPUT);
delay(1000);
// WiFi
connectWiFi();
delay(5000);
// MQTT broker
mqtt.setServer(MQTT_SERVER, MQTT_PORT);
connectMQTT();
mqtt.setCallback(callback_SUB);
}
void loop()
{
if (!mqtt.connected())
{
connectMQTT();
}
mqtt.loop();
delay(1000);
}
void connectWiFi()
{
Serial.println("Connecting to WiFi");
WiFi.begin(WLAN_SSID, WLAN_PASS);
while (WiFi.status() != WL_CONNECTED)
{
delay(1000);
Serial.println("Connecting to WiFi...");
}
Serial.println("Connected to WiFi");
}
void connectMQTT()
{
Serial.println("Connecting to MQTT");
while (!mqtt.connected())
{
if (mqtt.connect("MQ135_Publish"))
{
Serial.println("Connected to MQTT");
mqtt.subscribe("sensor/mq135/#");
}
else
{
Serial.print("Failed to connect to MQTT, rc=");
Serial.print(mqtt.state());
Serial.println(" Retrying in 5 seconds...");
delay(5000);
}
}
}
int cnt = 0;
void callback_SUB(char *topic, byte *payload, unsigned int length)
{
if (cnt == 3)
{
callback_PUB();
cnt = 0;
}
else
{
// --------------------MQ135_SUB--------------------
String message;
for (int i = 0; i < length; i++)
{
message += (char)payload[i];
}
Serial.println(message);
// Counter to keep track of received messages
int messageCounter;
float num1, num2, num3;
if ((strcmp(topic, "sensor/mq135/_1") == 0) and (cnt == 0))
{
messageCounter = 1;
num1 = message.toFloat();
Output(message, messageCounter, num1);
cnt += 1;
}
else if ((strcmp(topic, "sensor/mq135/_2") == 0) and (cnt == 1))
{
messageCounter = 2;
num2 = message.toFloat();
Output(message, messageCounter, num2);
cnt += 1;
}
else if ((strcmp(topic, "sensor/mq135/_3") == 0) and (cnt == 2))
{
messageCounter = 3;
num3 = message.toFloat();
Output(message, messageCounter, num3);
cnt += 1;
} else {
Serial.println("One more time");
}
Serial.println(cnt);
}
}
void Output(String message, unsigned int messageCounter, float num) {
float num1, num2, num3 = 0 ;
if (messageCounter == 1) {
num1 = num;
} else if (messageCounter == 2) {
num2 = num;
} else if (messageCounter == 3) {
num3 = num;
}
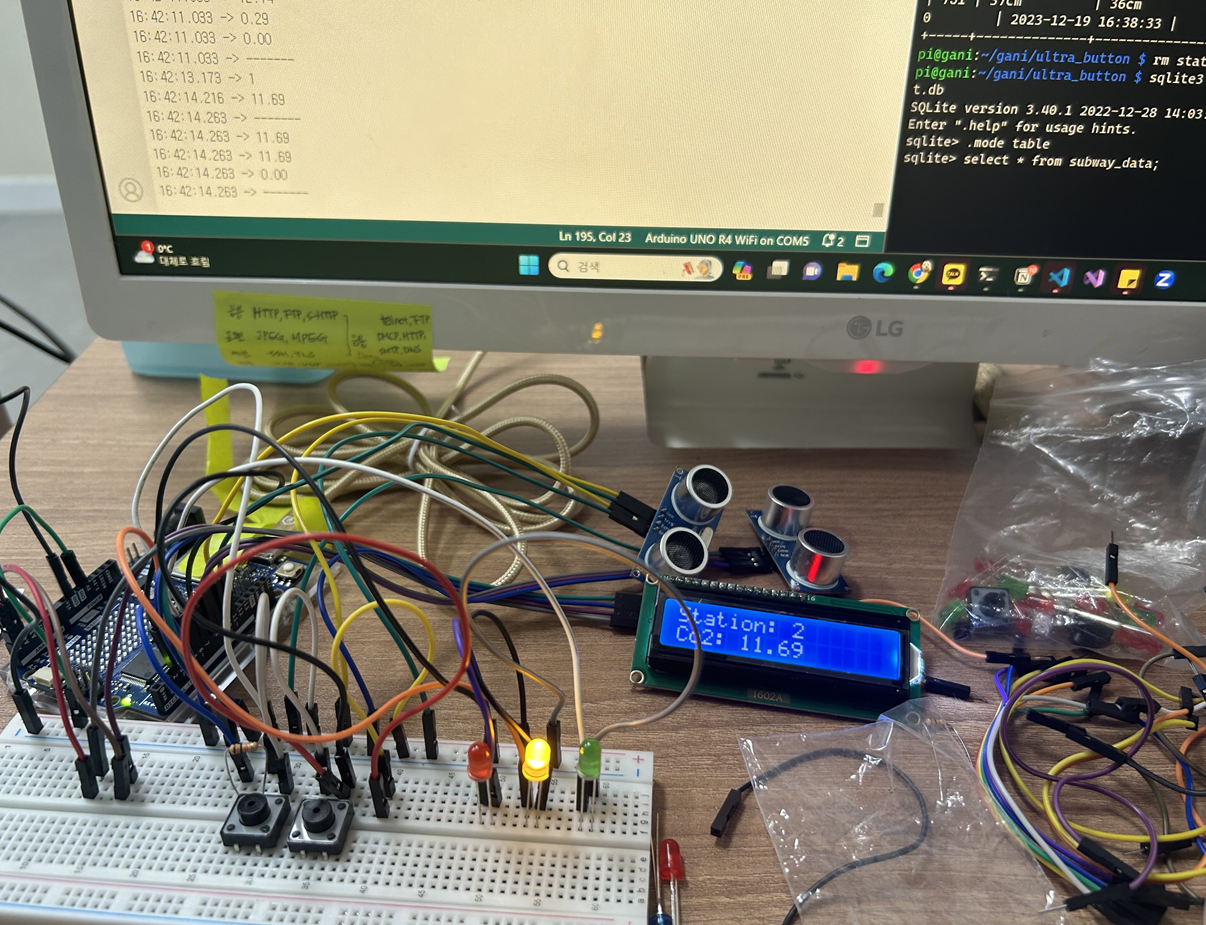
lcd.setCursor(0, 0);
lcd.print("Station: ");
lcd.print(messageCounter);
lcd.setCursor(0, 1);
lcd.print("Co2: ");
lcd.print(message);
Serial.println("-------");
Serial.println(num1);
Serial.println(num2);
Serial.println(num3);
Serial.println("-------");
// led
if ((num1 > 13) || (num2 > 15) || (num3 > 14))
{
digitalWrite(RED, HIGH);
digitalWrite(YELLOW, LOW);
digitalWrite(GREEN, LOW);
}
else if ((num1 > 8) or (num2 > 10) or (num3 > 9))
{
digitalWrite(RED, LOW);
digitalWrite(YELLOW, HIGH);
digitalWrite(GREEN, LOW);
}
else if ((num1 > 0) or (num2 > 0) or (num3 > 0))
{
digitalWrite(RED, LOW);
digitalWrite(YELLOW, LOW);
digitalWrite(GREEN, HIGH);
}
delay(2000);
lcd.clear();
}
void callback_PUB()
{
// --------------------Door_Button_PUB--------------------
long sensor1val, sensor2val;
sensor1val = sonar[0].ping_cm();
sensor2val = sonar[1].ping_cm();
// 물체에 반사되어돌아온 초음파의 시간을 변수에 저장합니다.
Serial.print("A Ping : ");
// sonar.ping_cm() : 센서 거리를 'cm'로 계산된 값을 출력
Serial.print(sensor1val);
Serial.println("cm");
Serial.print("B Ping : ");
Serial.print(sensor2val);
Serial.println("cm");
char buffer1[15];
char buffer2[15];
char str[] = "cm";
ltoa(sensor1val, buffer1, 10);
ltoa(sensor2val, buffer2, 10);
strcat(buffer1, str);
strcat(buffer2, str);
delay(100);
// button
int push1 = digitalRead(6);
Serial.print("push1 = ");
Serial.println(push1);
int push2 = digitalRead(7);
Serial.print("push2 = ");
Serial.println(push2);
// Publish ultrasonic 센서 값 MQTT 토픽 설정
mqtt.publish("sensor/ultrasonic_1", buffer1);
mqtt.publish("sensor/ultrasonic_2", buffer2);
delay(1000);
// Publish button 센서 값 MQTT 토픽 설정
mqtt.publish("sensor/button_1", String(push1).c_str());
mqtt.publish("sensor/button_2", String(push2).c_str());
delay(1000);
}
728x90
반응형