
😎 공부하는 징징알파카는 처음이지?
[v0.28]영상처리_이미지의 특징점, 특징점 검출기 본문
220115 작성
<본 블로그는 귀퉁이 서재님의 블로그를 참고해서 공부하며 작성하였습니다>
OpenCV - 26. 이미지의 특징점(Keypoints)과 특징점 검출기(Keypoints detector)
이번 포스팅에서는 이미지의 특징점과 특징점 검출기 대해 알아보겠습니다. 이번 포스팅 역시 '파이썬으로 만드는 OpenCV 프로젝트(이세우 저)'를 정리한 것임을 밝힙니다. 코드: github.com/BaekKyunShi
bkshin.tistory.com
이미지 검출하기 위해서는 이미지의 특징점 찾아야함!
1. 이미지 특징점
: 이미지에서 특징이 되는 부분
: 이미지끼리 서로 매칭이 되는지 확인을 할 때 각 이미지에서의 특징이 되는 부분끼리 비교
: 이미지 매칭 시 사용하는 것이 바로 특징점
: 특징점은 영어로 키 포인트(Keypoints)
: 보통 특징점이 되는 부분은 물체의 모서리나 코너
: 대부분의 특징점 검출을 코너 검출을 바탕으로 함
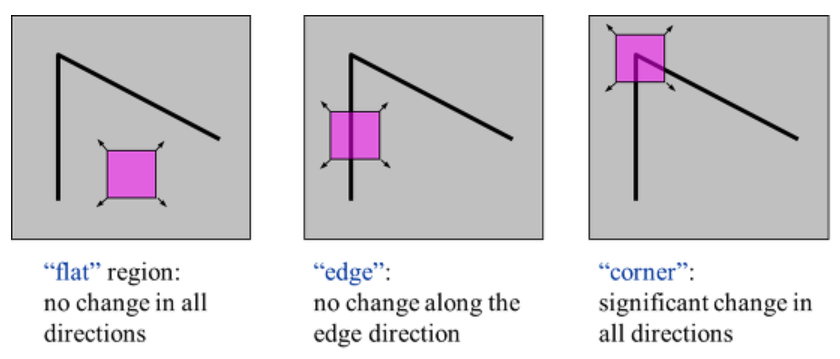
2. 해리스 코너 검출 (Harris Corner Detection)
: 물체를 인식할 때 물체의 코너 부분에 관심을 둠
: 이미지 상의 코너를 잘 찾아낸다면 물체를 보다 쉽게 인식
: 코너를 검출하기 위한 방법
: 해리스 코너 검출은 소벨(Sobel) 미분으로 경곗값을 검출하면서 경곗값의 경사도 변화량을 측정하여
변화량이 수직, 수평, 대각선 방향으로 크게 변화하는 것을 코너로 판단
dst = cv2.cornerHarris(src, blockSize, ksize, k, dst, borderType)
- src : 입력 이미지, 그레이 스케일
- blockSize : 이웃 픽셀 범위
- ksize : 소벨 미분 필터 크기
- k(optional) : 코너 검출 상수 (보토 0.04~0.06)
- dst(optional) : 코너 검출 결과 (src와 같은 크기의 1 채널 배열, 변화량의 값, 지역 최대 값이 코너점을 의미)
- borderType(optional) : 외곽 영역 보정 형식
# 해리스 코너 검출
import cv2
import numpy as np
img = cv2.imread('img/house.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 해리스 코너 검출 ---①
corner = cv2.cornerHarris(gray, 2, 3, 0.04)
# 변화량 결과의 최대값 10% 이상의 좌표 구하기 ---②
coord = np.where(corner > 0.1* corner.max())
coord = np.stack((coord[1], coord[0]), axis=-1)
# 코너 좌표에 동그리미 그리기 ---③
for x, y in coord:
cv2.circle(img, (x,y), 5, (0,0,255), 1, cv2.LINE_AA)
# 변화량을 영상으로 표현하기 위해서 0~255로 정규화 ---④
corner_norm = cv2.normalize(corner, None, 0, 255, cv2.NORM_MINMAX, cv2.CV_8U)
# 화면에 출력
corner_norm = cv2.cvtColor(corner_norm, cv2.COLOR_GRAY2BGR)
merged = np.hstack((corner_norm, img))
cv2.imshow('Harris Corner', merged)
cv2.waitKey()
cv2.destroyAllWindows()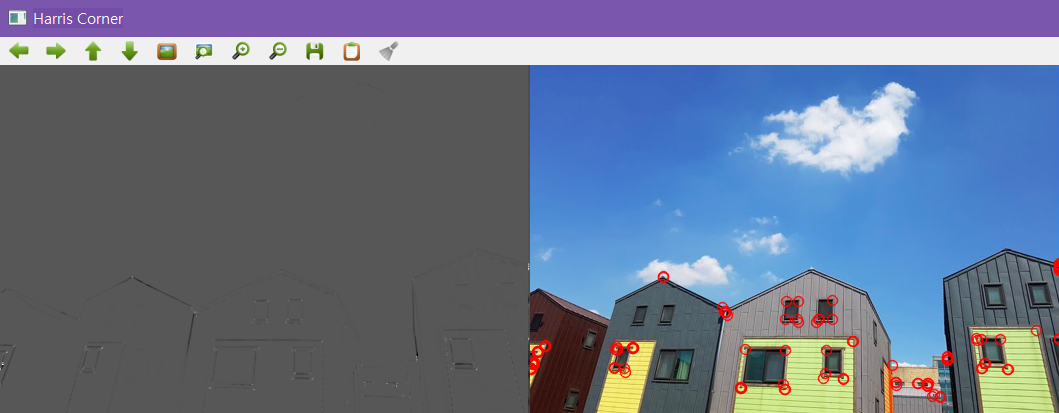
: 오른쪽 이미지는 해리스 코너 검출을 실행하여 그 결과의 최대 값의 10% 이상인 좌표에만 빨간색 동그라미 표시
: 코너에서 픽셀의 변화량이 가장 크다
: cv2.cornerHarris() 함수의 변환 결과는 입력 이미지와 크기가 같은 1차원 배열
: 결과 값의 지역 최대 값(Local Maximum)은 코너를 의미
: 왼쪽 이미지는 해리스 코너 검출 결과를 0~255로 정규화하여 나타낸 것
: 오른쪽 이미지에서 빨간색 동그라미가 표시되어 있는 코너 부분이 왼쪽 이미지에서도 가장 짙게 표시됨
3. 시-토마시 검출 (Shi & Tomasi Detection)
: 해리스 코너 검출을 좀 더 개선한 알고리즘
corners = cv2.goodFeaturesToTrack(img, maxCorners, qualityLevel, minDistance, corners, mask, blockSize, useHarrisDetector, k)
- img : 입력 이미지
- maxCorners : 얻고 싶은 코너의 개수, 강한 것 순으로
- qualityLevel : 코너로 판단할 스레시홀드 값
- minDistance : 코너 간 최소 거리
- mask(optional) : 검출에 제외할 마스크
- blockSize(optional)=3 : 코너 주변 영역의 크기
- useHarrisDetector(optional)=False : 코너 검출 방법 선택 (True: 해리스 코너 검출, False: 시와 토마시 코너 검출)
- k(optional) : 해리스 코너 검출 방법에 사용할 k 계수
- corners : 코너 검출 좌표 결과, N x 1 x 2 크기의 배열, 실수 값이므로 정수로 변형 필요
# 시와 토마시 코너 검출
import cv2
import numpy as np
img = cv2.imread('img/house.jpg')
img1 = img.copy()
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 시-토마스의 코너 검출 메서드
corner1 = cv2.goodFeaturesToTrack(gray, 80, 0.01, 10)
# 실수 좌표를 정수 좌표로 변환
corner1 = np.int32(corner1)
# 좌표에 동그라미 표시
for corner in corner1:
x, y = corner[0]
cv2.circle(img, (x, y), 5, (0,0,255), 1, cv2.LINE_AA)
# ----------------------------------------------------
# 해리스 코너 검출 ---①
corner2 = cv2.cornerHarris(gray, 2, 3, 0.04)
# 변화량 결과의 최대값 10% 이상의 좌표 구하기 ---②
coord = np.where(corner2 > 0.1* corner2.max())
coord = np.stack((coord[1], coord[0]), axis=-1)
# 코너 좌표에 동그리미 그리기 ---③
for x, y in coord:
cv2.circle(img1, (x,y), 5, (0,0,255), 1, cv2.LINE_AA)
merged = np.hstack((img, img1))
cv2.imshow('Shi & Tomasi Detection, Harris Corner Detection', merged)
cv2.waitKey()
cv2.destroyAllWindows()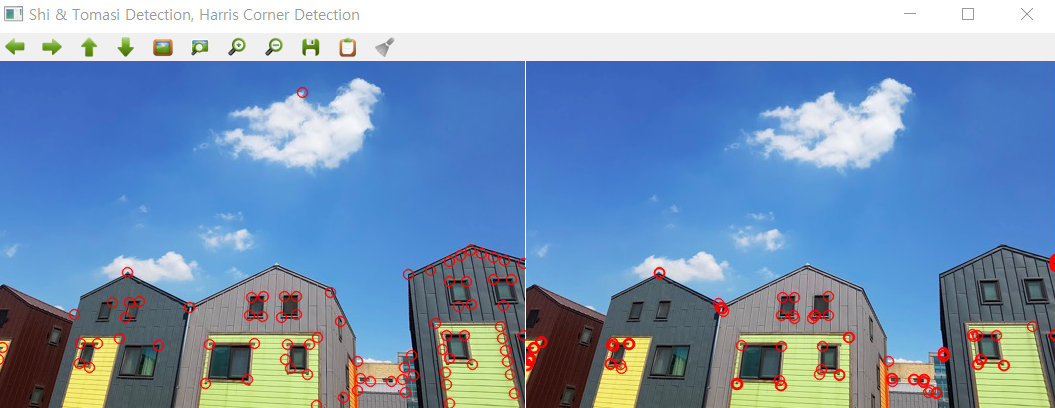
: 시-토마시 검출가 더 많은 코너 검출됨
4. 특징점 검출기
: 각각의 특징점도 좌표(x, y) 이외에 다양한 정보를 가진다
: 해리스 코너 검출과 시-토마시 검출의 함수 반환 결과는 단지 특징점의 좌표
: 특징점 검출기들의 반환 결과는 특징점의 좌표뿐만 아니라 다양한 정보들도 함께 반환
keypoints = detector.detect(img, mask)
: 특징점 검출 함수
- img : 입력 이미지
- mask(optional) : 검출 제외 마스크
- keypoints : 특징점 검출 결과 (KeyPoint의 리스트)
Keypoint
: 특징점 정보를 담는 객체
- pt : 특징점 좌표(x, y), float 타입으로 정수 변환 필요
- size : 의미 있는 특징점 이웃의 반지름
- angle : 특징점 방향 (시계방향, -1=의미 없음)
- response : 특징점 반응 강도 (추출기에 따라 다름)
- octave : 발견된 이미지 피라미드 계층
- class_id : 특징점이 속한 객체 ID
: detector.detect() 함수의 반환 결과인 Keypoints에는 다양한 정보들이 담겨있음
: Keypoints는 특징점의 좌표 정보인 pt 속성을 항상 갖지만
나머지 속성은 사용하는 검출기에 따라 반환하지 않을 수도 있음
: 검출한 특징점은 cv2.circle() 함수를 사용해서 표시할 수도 있지만 특징점을 표시해주는 전용 함수도 가능
outImg = cv2.drawKeypoints(img, keypoints, outImg, color, flags)
: 특징점을 표시해주는 전용 함수
- img : 입력 이미지
- keypoints : 표시할 특징점 리스트
- outImg : 특징점이 그려진 결과 이미지
- color(optional) : 표시할 색상 (default : 랜덤)
- flags(optional) : 표시 방법
- cv2.DRAW_MATCHES_FLAGS_DEFAULT : 좌표 중심에 동그라미만 그림(default)
- cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS : 동그라미의 크기를 size와 angle을 반영해서 그림
5. GFTTDetector
: cv2.goodFeaturesToTrack() 함수로 구현된 특징점 검출기 <시-토마시 코너 검출 방법>
: GFTTDetector 검출기를 활용하여 특징점을 검출하는데 사용하는 함수는 detect() 함수와 같음
detector = cv2.GFTTDetector_create(img, maxCorners, qualityLevel, minDistance, corners, mask, blockSize, useHarrisDetector, k)
: GFTTDetector 함수의 생성
- 모든 파라미터는 cv2.goodFeaturesToTrack()과 동일
- 검출한 결과는 특징점 좌표(pt) 속성만 있고 나머지 속성 값은 모두 비었음
# GFTTDetector로 특징점 검출
import cv2
import numpy as np
img = cv2.imread("img/house.jpg")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Good feature to trac 검출기 생성 ---①
gftt = cv2.GFTTDetector_create()
# 특징점 검출 ---②
keypoints = gftt.detect(gray, None)
# 특징점 그리기 ---③
img_draw = cv2.drawKeypoints(img, keypoints, None)
# 결과 출력 ---④
cv2.imshow('GFTTDectector', img_draw)
cv2.waitKey(0)
cv2.destrolyAllWindows()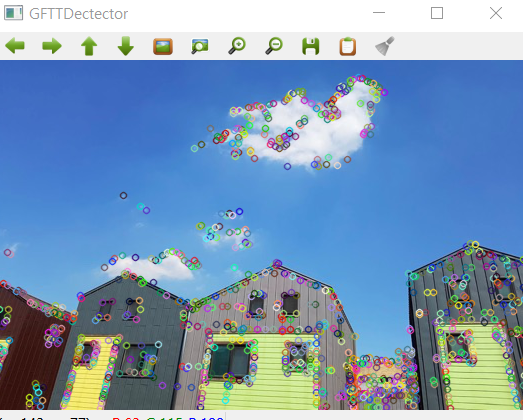
: 해리스 코너 검출과 시와 토마시 코너 검출보다 더 많은 코너가 검출
: 특징점을 표시한 동그라미의 색상이 다양
: 특징점을 표시하는 함수인 cv2.drawKeypoints() 함수에서 color 속성을 지정하지 않으면 랜덤한 색상
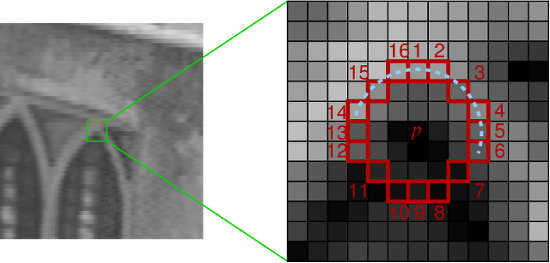
6. FAST(Feature from Accelerated Segment Test)
: FAST는 기존 검출기보다 속도가 빠른 검출기
: 코너를 검출할 때 미분 연산을 하지 않음
: 픽셀을 중심으로 특정 개수의 픽셀로 원을 그려서 그 안의 픽셀들이 중심 픽셀 값보다 임계 값 이상 밝거나 어두운 것이 일정 개수 이상 연속되면 코너로 판단
detector = cv2.FastFeatureDetector_create(threshold, nonmaxSuppression, type)
: 특징점 검출 시에는 detect() 함수를 사용
- threshold(optional) : 코너 판단 임계 값 (default=10)
- nonmaxSuppression(optional) : 최대 점수가 아닌 코너 억제 (default=True)
- type(optional) : 엣지 검출 패턴
- cv2.FastFeatureDetector_TYPE_9_16 : 16개 중 9개 연속(default)
- cv2.FastFeatureDetector_TYPE_7_12 : 12개 중 7개 연속
- cv2.FastFeatureDetector_TYPE_5_8 : 8개 중 5개 연속
# FAST로 특징점 검출
import cv2
import numpy as np
img = cv2.imread('img/house.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# FASt 특징 검출기 생성 ---①
fast = cv2.FastFeatureDetector_create(50)
# 특징점 검출 ---②
keypoints = fast.detect(gray, None)
# 특징점 그리기 ---③
img = cv2.drawKeypoints(img, keypoints, None)
# 결과 출력 ---④
cv2.imshow('FAST', img)
cv2.waitKey()
cv2.destroyAllWindows()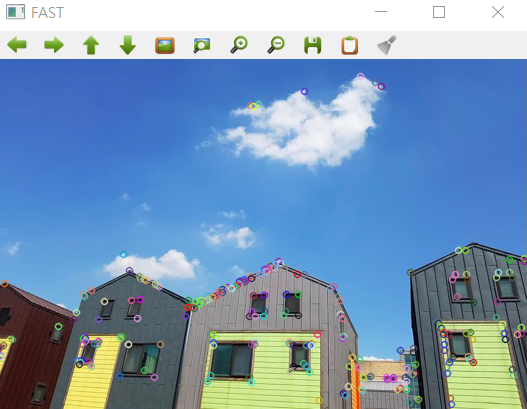
7. SimpleBlobDetector
: BLOB(Binary Large Object)는 이진 스케일로 연결된 픽셀 그룹
: SimpleBlobDetector는 자잘한 객체는 노이즈로 여기고 특정 크기 이상의 큰 객체만 찾아내는 검출기
detector = cv2.SimpleBlobDetector_create([parameters])
: BLOB 검출기 생성자
- cv2.SimpleBlobDetector_Params()
- minThreshold, maxThreshold, thresholdStep : BLOB를 생성하기 위한 경계 값 (minThreshold에서 maxThreshold를 넘지 않을 때까지 thresholdStep만큼 증가)
- minRepeatability : BLOB에 참여하기 위한 연속된 경계 값의 개수
- minDistBetweenBlobs : 두 BLOB을 하나의 BLOB으로 간주하는 거리
- filterByArea : 면적 필터 옵션
- minArea, maxArea : min~max 범위의 면적만 BLOB으로 검출
- filterByCircularity : 원형 비율 필터 옵션
- minCircularity, maxCircularity : min~max 범위의 원형 비율만 BLOB으로 검출
- filterByColor : 밝기를 이용한 필터 옵션
- blobColor : 0 = 검은색 BLOB 검출, 255 = 흰색 BLOB 검출
- filterByConvexity : 볼록 비율 필터 옵션
- minConvexity, maxConvexity : min~max 범위의 볼록 비율만 BLOB으로 검출
- filterByInertia : 관성 비율 필터 옵션
- minInertiaRatio, maxInertiaRatio : min~max 범위의 관성 비율만 BLOB으로 검출
# SimpleBolbDetector 검출기
import cv2
import numpy as np
img = cv2.imread("img/house.jpg")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# SimpleBlobDetector 생성 ---①
detector = cv2.SimpleBlobDetector_create()
# 키 포인트 검출 ---②
keypoints = detector.detect(gray)
# 키 포인트를 빨간색으로 표시 ---③
img = cv2.drawKeypoints(img, keypoints, None, (0,0,255),\
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv2.imshow("Blob", img)
cv2.waitKey(0)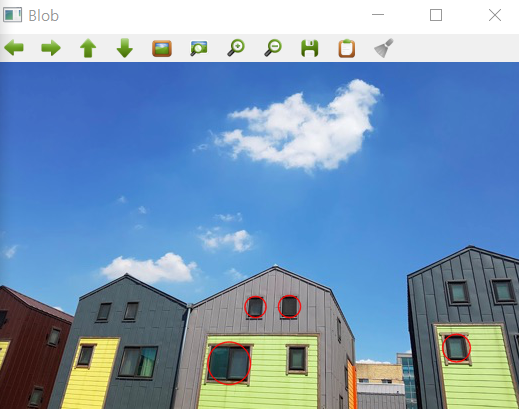
: 자잘한 코너는 노이즈로 간주하고 특정 크기 이상의 객체만 검출
+) SimpleBlobDetector에 필터 옵션을 주어 실행
# 필터 옵션으로 생성한 SimpleBlobDetector 검출기
import cv2
import numpy as np
img = cv2.imread("img/house.jpg")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# blob 검출 필터 파라미터 생성 ---①
params = cv2.SimpleBlobDetector_Params()
# 경계값 조정 ---②
params.minThreshold = 10
params.maxThreshold = 240
params.thresholdStep = 5
# 면적 필터 켜고 최소 값 지정 ---③
params.filterByArea = True
params.minArea = 200
# 컬러, 볼록 비율, 원형비율 필터 옵션 끄기 ---④
params.filterByColor = False
params.filterByConvexity = False
params.filterByInertia = False
params.filterByCircularity = False
# 필터 파라미터로 blob 검출기 생성 ---⑤
detector = cv2.SimpleBlobDetector_create(params)
# 키 포인트 검출 ---⑥
keypoints = detector.detect(gray)
# 키 포인트 그리기 ---⑦
img_draw = cv2.drawKeypoints(img, keypoints, None, None,\
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# 결과 출력 ---⑧
cv2.imshow("Blob with Params", img_draw)
cv2.waitKey(0)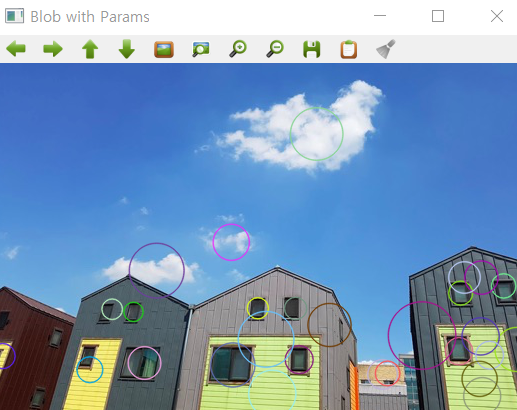
: 이전보다 더 많은 객체 검출!
끝~
'👩💻 IoT (Embedded) > Image Processing' 카테고리의 다른 글
| [v0.30]영상처리_특징 매칭(Feature Matching) (0) | 2022.01.16 |
|---|---|
| [v0.29]영상처리_특징 디스크립터 검출기 (0) | 2022.01.15 |
| [v0.27]영상처리_이미지 매칭 (Image Matching) (0) | 2022.01.13 |
| [v0.26]영상처리_연속 영역 분할 (0) | 2022.01.12 |
| [v0.25]영상처리_허프 변환 (0) | 2022.01.12 |



