
😎 공부하는 징징알파카는 처음이지?
5. OpenCV로 이미지 차이 분석하기 – “천체 이미지로 명왕성을 찾아보자” 본문
5. OpenCV로 이미지 차이 분석하기 – “천체 이미지로 명왕성을 찾아보자”
징징알파카 2022. 10. 20. 13:50
221020 작성
<본 블로그는실전 파이썬 핸즈온 프로젝트의 github 를 참고해서 공부하며 작성하였습니다>
https://www.onlybook.co.kr/m/entry/python-projects
실전 파이썬 핸즈온 프로젝트
실전 파이썬 핸즈온 프로젝트 문제 해결과 실무 응용력을 키우기 위한 나만의 파이썬 포트폴리오 만들기 리 본 지음 | 오현석 옮김 420쪽 | 28,000원 | 2022년 5월 31일 출간 | 185*240*20 | ISBN13 9791.
www.onlybook.co.kr
https://github.com/rlvaugh/Real_World_Python
GitHub - rlvaugh/Real_World_Python: Code and supporting files for book Real World Python
Code and supporting files for book Real World Python - GitHub - rlvaugh/Real_World_Python: Code and supporting files for book Real World Python
github.com
😊 OpenCV와 NumPy
: 클라이드 톰보가 1930년 명왕성을 발견할 때 사용한 장치인 ‘반짝 비교정’을 복원
: 현대적인 컴퓨터 비전 기술을 사용해 자동으로 행성이나 운석과 같이 별 시야에서 이동 중인 순간적인 천체를 찾아낸다.
# """페어링된 이미지가 있는 2개의 폴더를 순환하고 이미지를 등록하고 깜박임"""
def main():
night1_files = sorted(os.listdir('./night_1'))
night2_files = sorted(os.listdir('./night_2'))
path1 = Path.cwd() / './night_1'
path2 = Path.cwd() / './night_2'
path3 = Path.cwd() / './night_1_registered'
for i, _ in enumerate(night1_files):
img1 = cv.imread(str(path1 / night1_files[i]), cv.IMREAD_GRAYSCALE)
img2 = cv.imread(str(path2 / night2_files[i]), cv.IMREAD_GRAYSCALE)
print("Comparing {} to {}.\n".format(night1_files[i], night2_files[i]))
# 핵심 포인트와 그들 사이의 가장 좋은 일치를 찾기
kp1, kp2, best_matches = find_best_matches(img1, img2)
img_match = cv.drawMatches(img1, kp1, img2, kp2,
best_matches, outImg=None)
# 두 이미지 사이에 선을 그림
height, width = img1.shape
cv.line(img_match, (width, 0), (width, height), (255, 255, 255), 1)
QC_best_matches(img_match) # 무시하려면 주석 처리
# 키포인트를 사용하여 왼쪽 이미지를 등록
img1_registered = register_image(img1, img2, kp1, kp2, best_matches)
# QC 등록 및 등록된 이미지 저장(선택 단계):
blink(img1, img1_registered, 'Check Registration', num_loops=5)
out_filename = '{}_registered.png'.format(night1_files[i][:-4])
cv.imwrite(str(path3 / out_filename), img1_registered) # 덮어쓴다
cv.destroyAllWindows()
# 깜박임 비교기 실행
blink(img1_registered, img2, 'Blink Comparator', num_loops=15)
# """두 이미지에 대한 키포인트 목록과 가장 잘 일치하는 목록을 반환"""
def find_best_matches(img1, img2):
orb = cv.ORB_create(nfeatures=100) # ORB 개체를 시작
# ORB로 키포인트와 디스크립터를 찾기
kp1, desc1 = orb.detectAndCompute(img1, mask=None)
kp2, desc2 = orb.detectAndCompute(img2, mask=None)
# Brute Force Matcher를 사용하여 키포인트 일치를 찾기
bf = cv.BFMatcher(cv.NORM_HAMMING, crossCheck=True)
matches = bf.match(desc1, desc2)
# 거리의 오름차순으로 일치 항목을 정렬하고 최상의 n개 일치 항목을 유지
matches = sorted(matches, key=lambda x: x.distance)
best_matches = matches[:MIN_NUM_KEYPOINT_MATCHES]
return kp1, kp2, best_matches
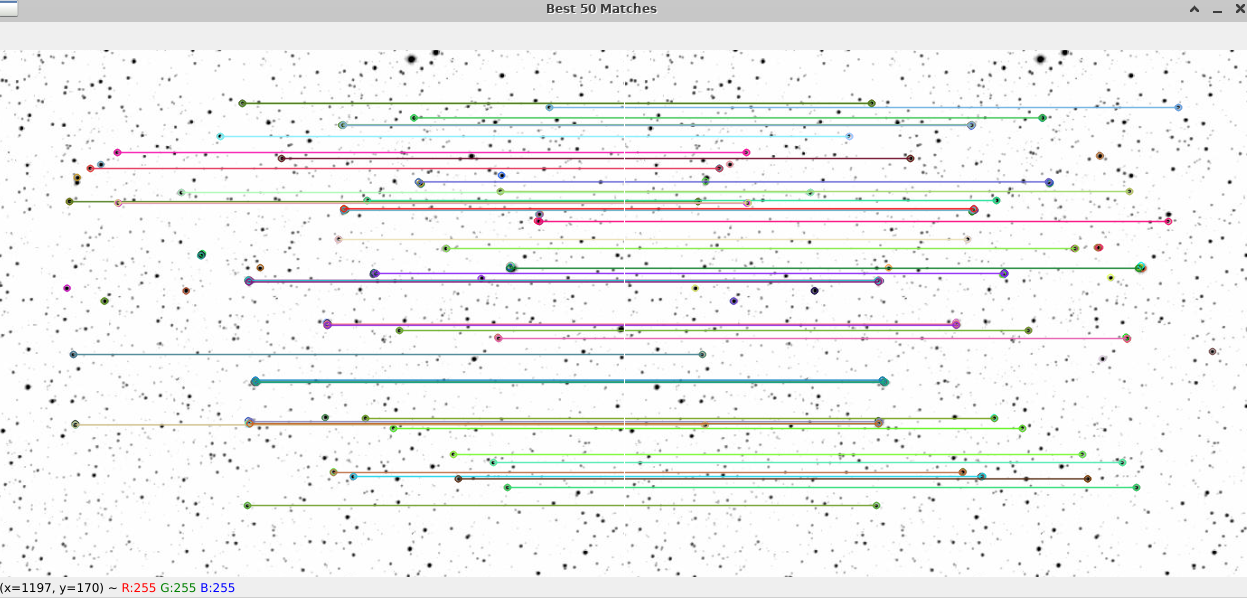
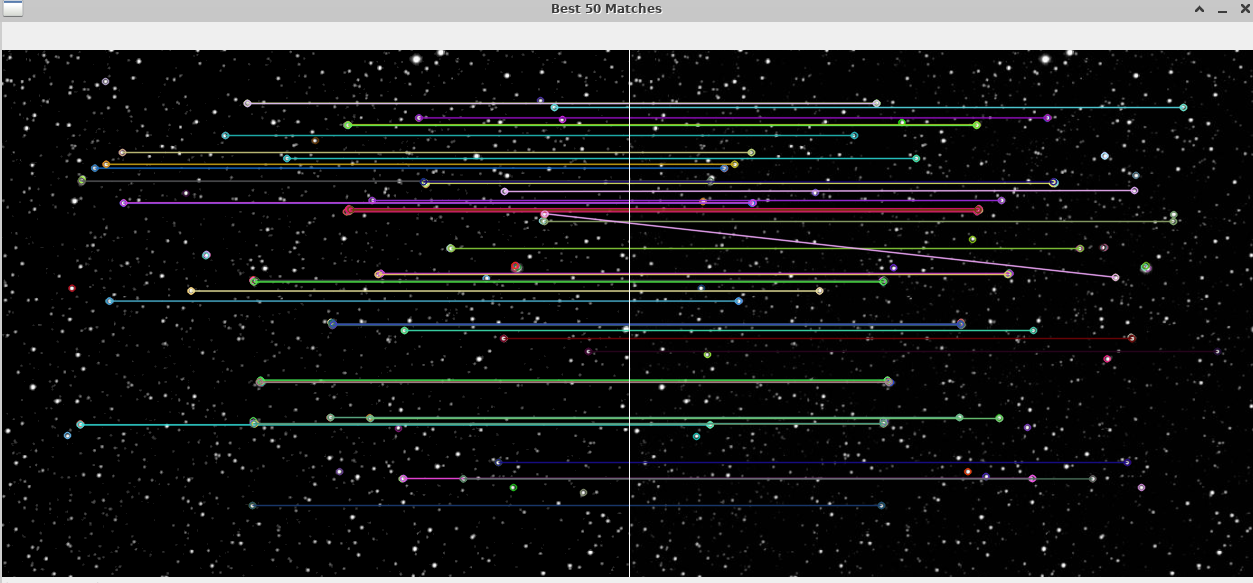
# """컬러 라인으로 연결된 최상의 키포인트 일치를 그린다"""
def QC_best_matches(img_match):
cv.imshow('Best {} Matches'.format(MIN_NUM_KEYPOINT_MATCHES), img_match)
cv.waitKey(2500) # 창을 2.5초 동안 활성 상태로 유지
# """두 번째 이미지에 등록된 첫 번째 이미지를 반환"""
def register_image(img1, img2, kp1, kp2, best_matches):
if len(best_matches) >= MIN_NUM_KEYPOINT_MATCHES:
src_pts = np.zeros((len(best_matches), 2), dtype=np.float32)
dst_pts = np.zeros((len(best_matches), 2), dtype=np.float32)
for i, match in enumerate(best_matches):
src_pts[i, :] = kp1[match.queryIdx].pt
dst_pts[i, :] = kp2[match.trainIdx].pt
# findHomography : 두 평면 사이의 투시 변환(Perspective transform)을 의미, homography matrix, H 추출
h_array, mask = cv.findHomography(src_pts, dst_pts, cv.RANSAC)
height, width = img2.shape # 이미지 2의 치수를 가져오기
# warpPerspective : 원근 맵 행렬에 대한 기하학적 변환을 수행
img1_warped = cv.warpPerspective(img1, h_array, (width, height))
return img1_warped
else:
print("WARNING: Number of keypoint matches < {}\n".format
(MIN_NUM_KEYPOINT_MATCHES))
return img1
# """두 개의 이미지로 깜박임 비교기를 복제"""
def blink(image_1, image_2, window_name, num_loops):
for _ in range(num_loops):
cv.imshow(window_name, image_1)
cv.waitKey(330)
cv.imshow(window_name, image_2)
cv.waitKey(330)
if __name__ == '__main__':
main()
😊 WSL2 UBUNTU GUI로 이미지 차이 분석하기
WSL2 UBUNTU GUI로 사용하기
www.youtube.com/watch?v=IL7Jd9rjgrM&list=LL&index=1 dev.to/darksmile92/linux-on-windows-wsl-with-desktop-environment-via-rdp-522g Linux on Windows: WSL with Desktop Environment via RDP WSL (Windows..
qkrm.tistory.com
고대로 따라하세용

'👩💻 IoT (Embedded) > Image Processing' 카테고리의 다른 글
| OpenCV 영상 구조와 표현 (0) | 2022.10.20 |
|---|---|
| OpenCV와 컴퓨터 비전 & 영상처리 (0) | 2022.10.20 |
| 영상 처리 분야에서 이상 탐지(Anomaly Detection) (1) | 2022.10.18 |
| 2D 영상처리와 3D 영상처리 (0) | 2022.10.18 |
| 1. 베이즈 확률로 위치 예측하기 “실종된 난파선 선원을 찾아라” (0) | 2022.10.17 |



