
😎 공부하는 징징알파카는 처음이지?
2D 영상처리와 3D 영상처리 본문
221018 작성
<본 블로그는 gitBook_Tutorial_PCL의 github 를 참고해서 공부하며 작성하였습니다>
https://github.com/adioshun/gitBook_Tutorial_PCL/blob/master/part-0/part00-chapter00.md
GitHub - adioshun/gitBook_Tutorial_PCL: PCL Library Tutorial 작성 중
PCL Library Tutorial 작성 중 . Contribute to adioshun/gitBook_Tutorial_PCL development by creating an account on GitHub.
github.com
💛 영상처리
신호 처리(Signal Processing)
: 신호에서 잡음을 제거하거나 정보를 추출해 이후 후속작업에서 활용할 수 있게 다듬는 작업
: 신호는 아날로그(Analog electrical signals) 또는 디지털 신호(Digital electronic signals) 로 표현되며, 음향, 전자기파, 영상 또는 센서 출력 값 등 다양한 측정값을 표현
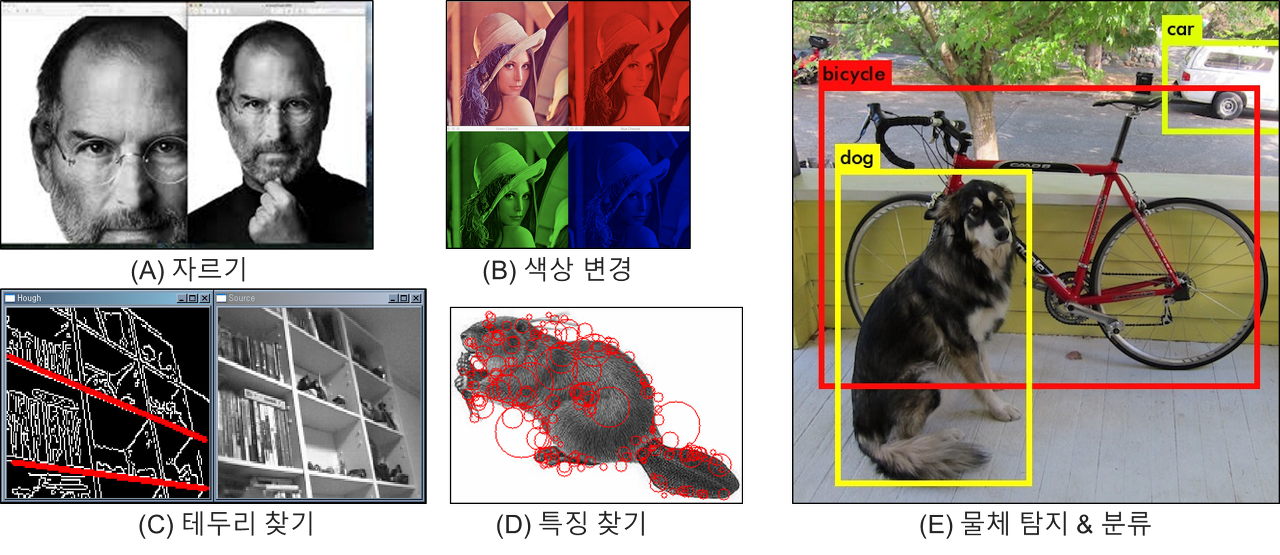
이미지 처리(Image Processing) vs 컴퓨터 비전(Computer Vision)
: 컴퓨터 비전과 이미지 처리는 같은 레벨이지만 목적은 다름
: 이미지 처리 기술은 주로 이미지 질을 향상시키거나 포맷(e.g. 히스토그램)을 변경해 이후 작업에 활용
: 컴퓨터 비전은 이미지에서 정보를 추출해 이해하는데 목적
=> 이미지 처리를 통해서 컬러 이미지를 흑백으로 변경하고 컴퓨터 비전을 통해서 이미지상 물체를 탐지
패턴인식(Pattern Recognition) and 머신러닝(Machine Learning)
: 패턴인식 또는 머신러닝은 데이터에서 특정한 패턴을 탐지하는데 목적을 둠
: 데이터는 엑셀파일과 같은 정형데이터 일수도 있고, 이미지나 센서와 같은 비정형 데이터
머신 비전(Machine Vision)
: 머신비전은 공학적 영역(Engineering domain)
: 위 기술들을 이용해 정밀검사, 공정제어 등의 산업적 활용하는 응용단을 의미
로봇 비전(Robot Vision)
: 로봇 비전은 일부 머신 비전의 기능을 사용
: 과학적 영역과 공학적 영역에 모두 포함
: 순수한 컴퓨터 비전 연구 분야와 달리 로봇 비전은 개발 시 로봇의 동역학, 물리적 변화 등을 고려
💛 2D 영상 데이터
: 이미지 영상은 크게 레스터(Raster)방식 이미지와 벡터(Vector)방식 이미지로 구분
- 레스터 방식은 정사각형 모양의 픽셀(Pixel) 수백개가 모여 전체 이미지를 구성하는 방식
- 컬러의 자연스러운 변화나 세밀한 그림을 표현하기 어려워 고해상도 이미지에는 레스터 방식이 사용
- 벡터 방식은 다양한 선들의 좌표와 수치 정보를 바탕으로 이미지를 화면에 표시하는 방식
- 픽셀 각각의 모든 컬러 정보를 저장하는 것이 아니라 기본적인 점의 위치 정보 정도만 기억
- 파일의 크기가 작고, 이미지를 축소하거나 확대해도 이미지에 손상을 주지 않는 것이 큰 장점
: 2D 영상 처리를 위한 라이브러리
- OpenCV(OpenCV, n.d.)
- scikit-image(Scikit-Image, n.d.)
- Pillow(PIL)
💛 3D 영상 데이터
- 3D 영상은 수동방식과 능동방식으로 생성 방식이 나누어 짐
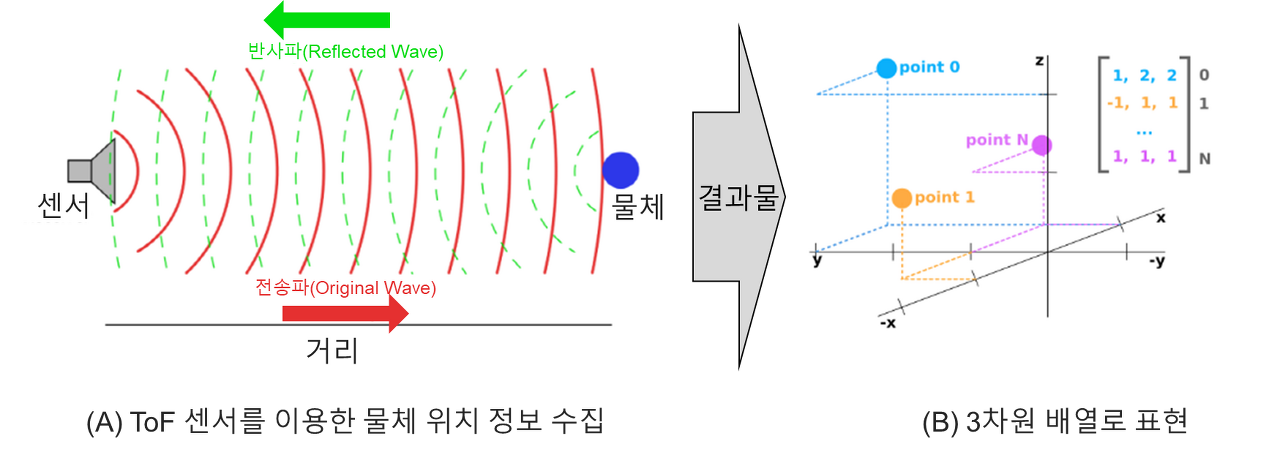
- 능동방식을 이용한 3D 영상은 센서가 물체에 빛이나 신호를 보내서 돌아오는 시간(ToF, Time of Flight)을 기록해 각 빛/신호의 시간당 이동 거리 정보를 계산 하고 하나의 점(Point)으로 만듦
- Point 1은 물체의 한 지점(Point)에 반사된 위치 정보를 표현하고 있으며, x(-1), y(1), z(1)의 위치 정보를 나타냄
- 한 물체는 여러 포인트 정보로 구성되며 이러한 여러 점(Point)의 집합(set cloud)이 3차원 공간상에 퍼져 있는 것이 구름의 입자와 같다고 하여 점군(Point cloud)라고 부름
- 점군은 2D 이미지와 다르게 깊이(z)정보를 가지고 있어 기본적으로 3차원 배열로 표현됨
- 각 N 줄은 하나의 점의 위치(x,y,z) 정보를 가지고 있음
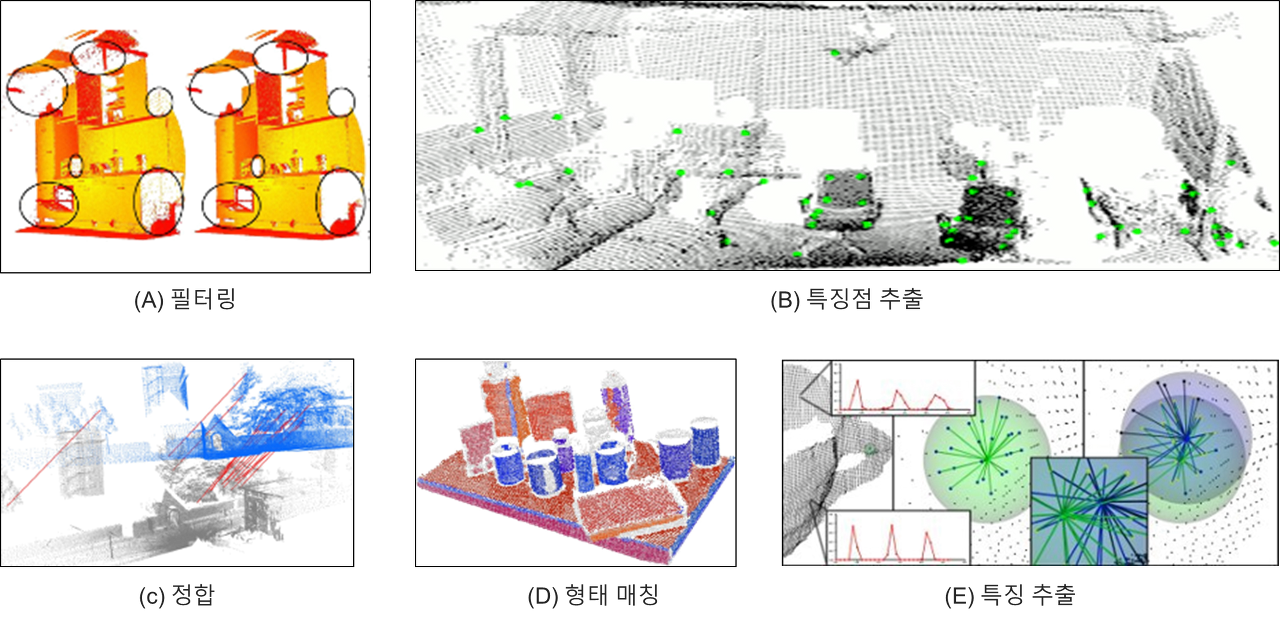
: 3D 영상 처리를 위한 라이브러리
- PCL(Point Cloud Library, n.d.)
- Open3D(Open3D, n.d.)Matlab(Computer Vision Toolbox)(
'👩💻 IoT (Embedded) > Image Processing' 카테고리의 다른 글
| 5. OpenCV로 이미지 차이 분석하기 – “천체 이미지로 명왕성을 찾아보자” (0) | 2022.10.20 |
|---|---|
| 영상 처리 분야에서 이상 탐지(Anomaly Detection) (1) | 2022.10.18 |
| 1. 베이즈 확률로 위치 예측하기 “실종된 난파선 선원을 찾아라” (0) | 2022.10.17 |
| [v0.35]영상처리_특징 매칭(Feature Matching) (0) | 2022.01.18 |
| [v0.34]영상처리_객체 추적을 위한 Tracking API (0) | 2022.01.18 |



