
😎 공부하는 징징알파카는 처음이지?
[v0.34]영상처리_객체 추적을 위한 Tracking API 본문
220118 작성
<본 블로그는 귀퉁이 서재님의 블로그를 참고해서 공부하며 작성하였습니다>
OpenCV - 32. 객체 추적을 위한 Tracking API
이번 포스팅에서는 객체 추적을 위한 Tracking API에 대해 배워보겠습니다. 이번 포스팅 역시 '파이썬으로 만드는 OpenCV 프로젝트(이세우 저)'를 정리한 것임을 밝힙니다. 코드: github.com/BaekKyunShin/Open
bkshin.tistory.com
1. Tracking API
: Tracking API를 이용하면 쉽게 객체 추적
: 추적하고자 하는 객체만 지정해주면 API가 알아서 객체를 추적
: OpenCV에서 제공하는 Tracking API생성자 (아래)
- tracker = cv2.TrackerBoosting_create() : AdaBoost 알고리즘 기반
- tracker = cv2.TrackerMIL_create() : MIL(Multiple Instance Learning) 알고리즘 기반
- tracker = cv2.TrackerKCF_create() : KCF(Kernelized Correlation Filters) 알고리즘 기반
- tracker = cv2.TrackerTLD_create() : TLD(Tracking, Learning and Detection) 알고리즘 기반
- tracker = cv2.TrackerMedianFlow_create() : 객체의 전방향/역방향을 추적해서 불일치성을 측정
- tracker = cv2.TrackerGOTURN_cretae() : CNN(Convolutional Neural Networks) 기반 (OpenCV 3.4 버그로 동작X)
- tracker = cv2.TrackerCSRT_create() : CSRT(Channel and Spatial Reliability)
- tracker = cv2.TrackerMOSSE_create() : 내부적으로 그레이 스케일 사용
: 생성한 Tracker는 init() 함수로 초기화
: init() 함수의 파라미터로 두 가지 (입력 영상과 추적 대상 객체가 있는 좌표) 전달
retval = cv2.Tracker.init(img, boundingBox)
: Tracker 초기화
: 초기화 후 새로운 영상 프레임에서 추적 대상 객체의 위치를 찾기 위해 update() 함수를 호출
- img: 입력 영상
- boundingBox : 추적 대상 객체가 있는 좌표 (x, y)
retval, boundingBox = cv2.Tracker.update(img)
: 새로운 프레임에서 추적 대상 객체 위치 찾기
- img: 새로운 프레임 영상
- retval : 추적 성공 여부
- boundingBox : 새로운 프레임에서의 추적 대상 객체의 새로운 위치 (x, y, w, h)
import cv2
import sys
# cv2 버전 확인
(major_ver, minor_ver, subminor_ver) = (cv2.__version__).split('.')
if __name__ == '__main__' :
tracker_types = ['BOOSTING', 'MIL','KCF', 'TLD', 'MEDIANFLOW', 'GOTURN', 'MOSSE']
tracker_type = tracker_types[2]
if int(minor_ver) < 3:
tracker = cv2.Tracker_create(tracker_type)
else:
if tracker_type == 'BOOSTING':
tracker = cv2.TrackerBoosting_create()
if tracker_type == 'MIL':
tracker = cv2.TrackerMIL_create()
if tracker_type == 'KCF':
tracker = cv2.TrackerKCF_create()
if tracker_type == 'TLD':
tracker = cv2.TrackerTLD_create()
if tracker_type == 'MEDIANFLOW':
tracker = cv2.TrackerMedianFlow_create()
if tracker_type == 'GOTURN':
tracker = cv2.TrackerGOTURN_create()
if tracker_type == 'MOSSE':
tracker = cv2.TrackerMOSSE_create()
# Read video
video = cv2.VideoCapture("img/highway.mp4")
# Exit if video not opened.
if not video.isOpened():
print ("Could not open video")
sys.exit()
# Read first frame.
ok, frame = video.read()
if not ok:
print ('Cannot read video file')
sys.exit()
# Define an initial bounding box
# bbox = (x,y,x+w,y+h)
# Uncomment the line below to select a different bounding box
bbox = cv2.selectROI(frame, False)
# Initialize tracker with first frame and bounding box
ok = tracker.init(frame, bbox)
while True:
# Read a new frame
ok, frame = video.read()
if not ok:
break
# Start timer
timer = cv2.getTickCount()
# Update tracker
ok, bbox = tracker.update(frame)
# Calculate Frames per second (FPS)
fps = cv2.getTickFrequency() / (cv2.getTickCount() - timer);
# Draw bounding box
if ok:
# Tracking success
p1 = (int(bbox[0]), int(bbox[1]))
p2 = (int(bbox[0] + bbox[2]), int(bbox[1] + bbox[3]))
cv2.rectangle(frame, p1, p2, (255,0,0), 2, 1)
else :
# Tracking failure
cv2.putText(frame, "Tracking failure detected", (100,80), cv2.FONT_HERSHEY_SIMPLEX, 0.75,(0,0,255),2)
# Display tracker type on frame
cv2.putText(frame, tracker_type + " Tracker", (100,20), cv2.FONT_HERSHEY_SIMPLEX, 0.75, (50,170,50),2);
# Display FPS on frame
cv2.putText(frame, "FPS : " + str(int(fps)), (100,50), cv2.FONT_HERSHEY_SIMPLEX, 0.75, (50,170,50), 2);
# Display result
cv2.imshow("Tracking", frame)
# Exit if ESC pressed
k = cv2.waitKey(1) & 0xff
if k == 27 : break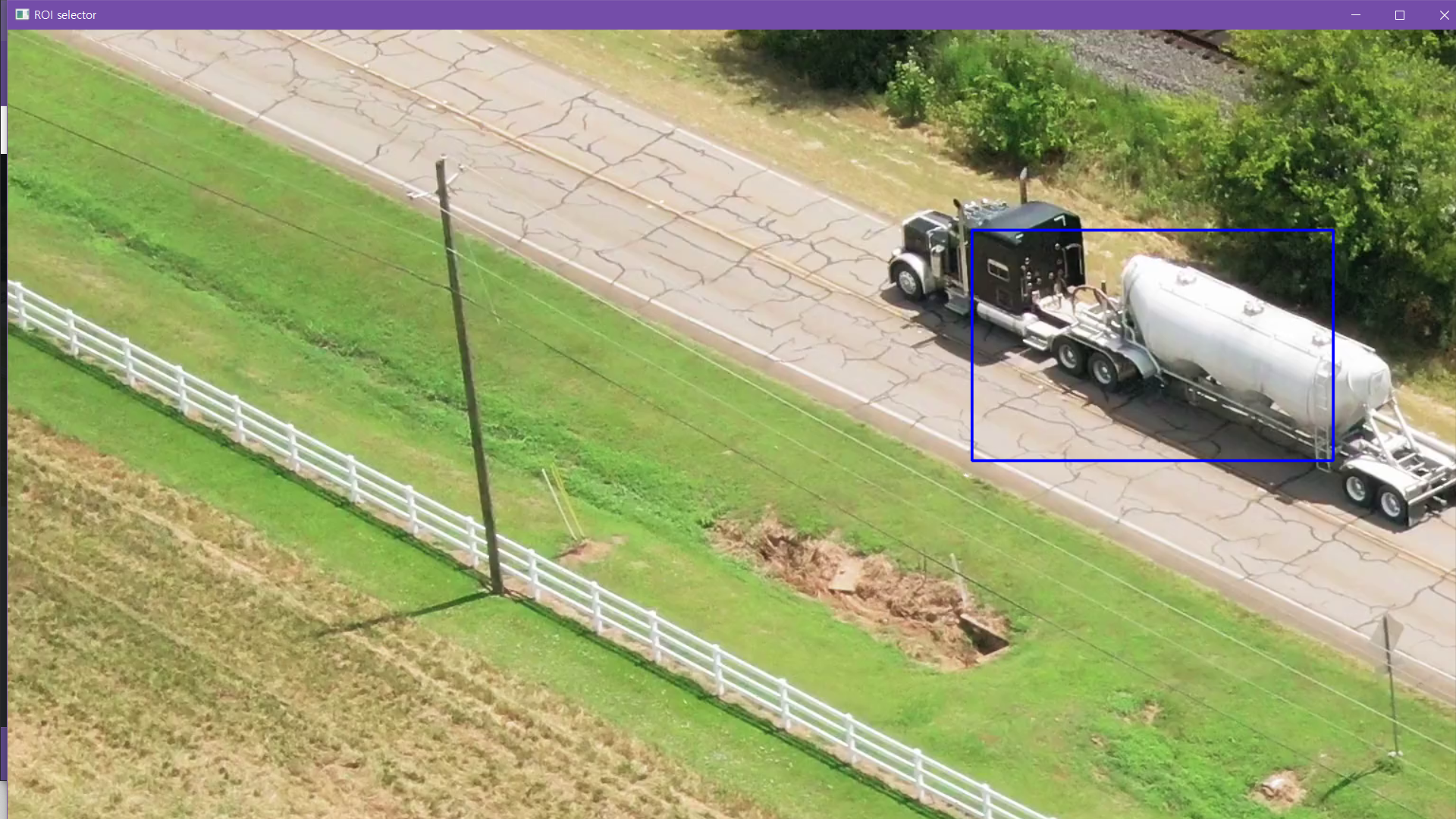
- 코드를 처음 실행하면 화면이 멈춰있음
- 추적을 원하는 객체를 드래그 + 다음으로 스페이스(space) 키를 누르기
- 자동으로 재생되고, 객체 추적을 시작
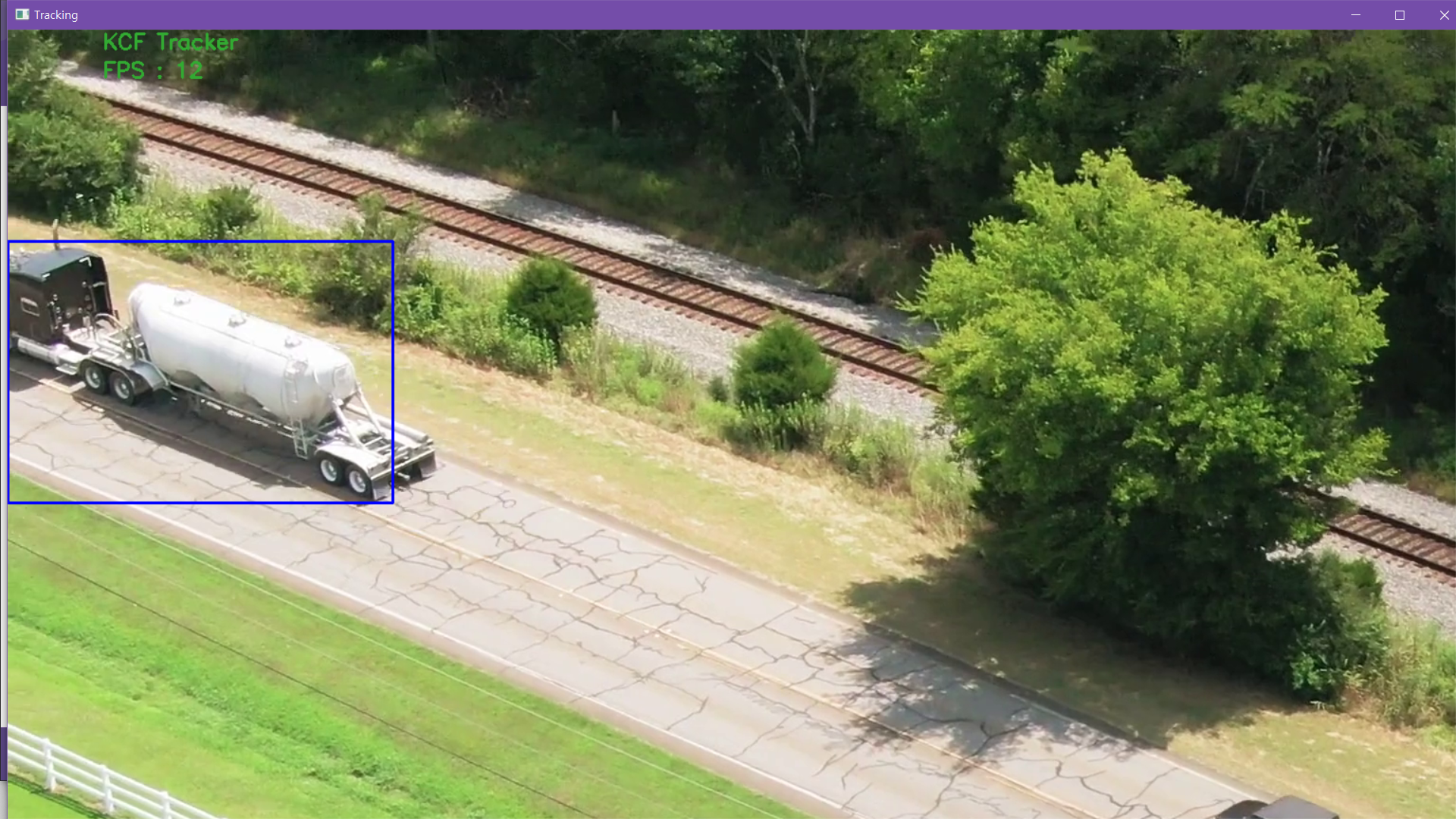
- 키보드 0~7 숫자 키를 눌러 트랙커 알고리즘을 선택 가능
- 다만 5를 누르면 오류가 뜨면서 종료 (버그땜시)
- 화면 상단의 0 : TrackerBoosting, 1 : TrackerMIL 등이 뜬다
- 현재 어떤 트랙커로 객체 추적을 하고 있는지를 나타내는 표시
오홍 이런걸로 자율주행 하는곤강
'👩💻 IoT (Embedded) > Image Processing' 카테고리의 다른 글
| 1. 베이즈 확률로 위치 예측하기 “실종된 난파선 선원을 찾아라” (0) | 2022.10.17 |
|---|---|
| [v0.35]영상처리_특징 매칭(Feature Matching) (0) | 2022.01.18 |
| [v0.33]영상처리_광학 흐름(Optical Flow) (0) | 2022.01.18 |
| [v0.32]영상처리_배경 제거 (0) | 2022.01.18 |
| [v0.31]영상처리_올바른 매칭점 찾기 (0) | 2022.01.17 |



