
😎 공부하는 징징알파카는 처음이지?
[v0.33]영상처리_광학 흐름(Optical Flow) 본문
220118 작성
<본 블로그는 귀퉁이 서재님의 블로그를 참고해서 공부하며 작성하였습니다>
OpenCV - 31. 광학 흐름(Optical Flow)
이번 포스팅에서는 객체 추적 방법인 광학 흐름에 관해 배워보겠습니다. 이번 포스팅 역시 '파이썬으로 만드는 OpenCV 프로젝트(이세우 저)'를 정리한 것임을 밝힙니다. 코드: github.com/BaekKyunShin/Op
bkshin.tistory.com
1. 광학 흐름(Optical Flow)
: 광학 흐름이란 영상 내 물체의 움직임 패턴
: 이전 프레임과 다음 프레임 간 픽셀이 이동한 방향과 거리 분포
: 광학 흐름으로 영상 내 물체가 어느 방향으로 얼마만큼 움직였는지 파악 가능
: 추가 연산을 하면 물체의 움직임을 예측 가능
: 광학 흐름은 다음 두 가지 사실을 가정
1. 연속된 프레임 사이에서 움직이는 물체의 픽셀 강도(intensity)는 변함이 없다.
2. 이웃하는 픽셀은 비슷한 움직임을 갖는다.
: 광학 흐름을 계산하는 방법은 두 가지
1. 일부 픽셀만 계산하는 희소(sparse) 광학 흐름
2. 영상 전체 픽셀을 모두 계산하는 밀집(dense) 광학 흐름
2. 루카스-카나데(Lucas-Kanade) 알고리즘
: 광학 흐름은 이웃하는 픽셀이 비슷하게 움직인다고 가정
: 루카스-카나데 알고리즘은 이 가정을 이용하는 알고리즘
: 이웃하는 픽셀은 비슷한 움직임을 갖는다고 생각하고 광학 흐름을 파악
: 작은 윈도(3 x 3 patch)를 사용하여 움직임을 계산 -> 물체 움직임이 크면 문제 (윈도 크기가 작기 때문)
: 개선하기 위해 이미지 피라미드를 사용
: 이미지 피라미드 위쪽으로 갈수록(이미지가 작아질수록) 작은 움직임은 티가 안 나고
큰 움직임은 작은 움직임 같아 보임 (큰 움직임도 감지 가능)
nextPts, status, err = cv2.calcOpticalFlowPyrLK(prevImg, nextImg, prevPts, nextPts, status, err, wirnSize, maxLevel, criteria, flags, minEigThreshold)
- prevImg : 이전 프레임 영상
- nextImg : 다음 프레임 영상
- prevPts : 이전 프레임의 코너 특징점, cv2.goodFeaturesToTrack()으로 검출
- nextPst : 다음 프레임에서 이동한 코너 특징점
- status : 결과 상태 벡터, nextPts와 같은 길이, 대응점이 있으면 1, 없으면 0
- err : 결과 에러 벡터, 대응점 간의 오차
- winSize=(21,21) : 각 이미지 피라미드의 검색 윈도 크기
- maxLevel=3 : 이미지 피라미드 계층 수
- criteria=(COUNT+EPS, 30, 0.01) : 반복 탐색 중지 요건
- cv2.TERM_CRITERIA_EPS : 정확도가 epsilon보다 작으면 중지
- cv2.TERM_CRITERIA_MAX_ITER : max_iter 횟수를 채우면 중지
- cv2.TERM_CRITERIA_COUNT : MAX_ITER와 동일
- max_iter : 최대 반복 횟수
- epsilon : 최소 정확도
- flgs=0 : 연산 모드
- 0 : prevPts를 nextPts의 초기 값으로 사용
- cv2.OPTFLOW_USE_INITAL_FLOW : nextPts의 값을 초기 값으로 사용
- cv2.OPTFLOW_LK_GET_MIN_EIGENVALS : 오차를 최소 고유 값으로 계산
- minEigThreshold=1e-4 : 대응점 계산에 사용할 최소 임계 고유 값
: 영상 내 픽셀 전체를 한번에 계산하지 않음
: cv2.goodFeaturesToTrack() 함수로 얻은 특징점만 활용하여 계산
: 두 특징점이 서로 대응하면 status 변수가 1, 그렇지 않으면 0
: maxLevel=0이면 이미지 피라미드를 사용하지 X
# calcOpticalFlowPyrLK 추적
import numpy as np, cv2
cap = cv2.VideoCapture('img/walking3.mp4')
fps = cap.get(cv2.CAP_PROP_FPS) # 프레임 수 구하기
delay = int(1000/fps)
# 추적 경로를 그리기 위한 랜덤 색상
color = np.random.randint(0,255,(200,3))
lines = None #추적 선을 그릴 이미지 저장 변수
prevImg = None # 이전 프레임 저장 변수
# calcOpticalFlowPyrLK 중지 요건 설정
termcriteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03)
while cap.isOpened():
ret,frame = cap.read()
if not ret:
break
img_draw = frame.copy()
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 최초 프레임 경우
if prevImg is None:
prevImg = gray
# 추적선 그릴 이미지를 프레임 크기에 맞게 생성
lines = np.zeros_like(frame)
# 추적 시작을 위한 코너 검출 ---①
prevPt = cv2.goodFeaturesToTrack(prevImg, 200, 0.01, 10)
else:
nextImg = gray
# 옵티컬 플로우로 다음 프레임의 코너점 찾기 ---②
nextPt, status, err = cv2.calcOpticalFlowPyrLK(prevImg, nextImg, \
prevPt, None, criteria=termcriteria)
# 대응점이 있는 코너, 움직인 코너 선별 ---③
prevMv = prevPt[status==1]
nextMv = nextPt[status==1]
for i,(p, n) in enumerate(zip(prevMv, nextMv)):
px,py = p.ravel()
nx,ny = n.ravel()
# 이전 코너와 새로운 코너에 선그리기 ---④
cv2.line(lines, (px, py), (nx,ny), color[i].tolist(), 2)
# 새로운 코너에 점 그리기
cv2.circle(img_draw, (nx,ny), 2, color[i].tolist(), -1)
# 누적된 추적 선을 출력 이미지에 합성 ---⑤
img_draw = cv2.add(img_draw, lines)
# 다음 프레임을 위한 프레임과 코너점 이월
prevImg = nextImg
prevPt = nextMv.reshape(-1,1,2)
cv2.imshow('OpticalFlow-LK', img_draw)
key = cv2.waitKey(delay)
if key == 27 : # Esc:종료
break
elif key == 8: # Backspace:추적 이력 지우기
prevImg = None
cv2.destroyAllWindows()
cap.release()
- cv2.goodFeatureToTrack() 함수로 이전 프레임의 특징점을 검출
- cv2.calcOpticalFlowPyrLK() 함수로 광학 흐름을 계산해 다음 프레임의 특징점 찾음
- 이전 프레임과 다음 프레임 특징점 중 잘 대응되는 특징점만 선별하여 선과 점으로 표시
- 원본 이미지에 추적선을 합성하는 방식으로 표현
- 나는 될 듯하다가 오류 난당... 까빙 보고 싶었는데
3. 군나르 파너백(Gunner Farneback) 알고리즘
: 밀집 방식으로 광학 흐름을 계산하는 알고리즘
: 밀집 방식은 영상 전체의 픽셀을 활용해 광학 흐름을 계산
flow = cv2.calcOpticalFlowFarneback(prev, next, flow, pyr_scale, levels, winsize, iterations, poly_n, poly_sigma, flags)
- prev, next : 이전, 이후 프레임
- flow : 광학 흐름 계산 결과, 각 픽셀이 이동한 거리 (입력과 동일한 크기)
- pyr_scale : 이미지 피라미드 스케일
- levels : 이미지 피라미드 개수
- winsize : 평균 윈도 크기
- iterations : 각 피라미드에서 반복할 횟수
- poly_n : 다항식 근사를 위한 이웃 크기, 5 또는 7
- poly_sigma : 다항식 근사에서 사용할 가우시안 시그마 (poly_n=5일 때는 1.1, poly_n=7일 때는 1.5)
- flags : 연산 모드
- cv2.OPTFLOW_USE_INITAL_FLOW : flow 값을 초기 값으로 사용
- cv2.OPTFLOW_FARNEBACK_GAUSSIAN : 박스 필터 대신 가우시안 필터 사용
: 밀집 광학 흐름은 희소 광학 흐름과 다르게 영상 전체 픽셀을 활용해 계산
: 추적할 특징점을 따로 전달할 필요가 없음
: 전체 픽셀을 활용해 계산하므로 속도가 느림
# calcOPticalFlowFarneback 추적
import cv2, numpy as np
# 플로우 결과 그리기 ---①
def drawFlow(img,flow,step=16):
h,w = img.shape[:2]
# 16픽셀 간격의 그리드 인덱스 구하기 ---②
idx_y,idx_x = np.mgrid[step/2:h:step,step/2:w:step].astype(np.int)
indices = np.stack( (idx_x,idx_y), axis =-1).reshape(-1,2)
for x,y in indices: # 인덱스 순회
# 각 그리드 인덱스 위치에 점 그리기 ---③
cv2.circle(img, (x,y), 1, (0,255,0), -1)
# 각 그리드 인덱스에 해당하는 플로우 결과 값 (이동 거리) ---④
dx,dy = flow[y, x].astype(np.int)
# 각 그리드 인덱스 위치에서 이동한 거리 만큼 선 그리기 ---⑤
cv2.line(img, (x,y), (x+dx, y+dy), (0,255, 0),2, cv2.LINE_AA )
prev = None # 이전 프레임 저장 변수
cap = cv2.VideoCapture('img/walking.mp4')
fps = cap.get(cv2.CAP_PROP_FPS) # 프레임 수 구하기
delay = int(1000/fps)
while cap.isOpened():
ret,frame = cap.read()
if not ret: break
gray = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
# 최초 프레임 경우
if prev is None:
prev = gray # 첫 이전 프레임 --- ⑥
else:
# 이전, 이후 프레임으로 옵티컬 플로우 계산 ---⑦
flow = cv2.calcOpticalFlowFarneback(prev,gray,None,\
0.5,3,15,3,5,1.1,cv2.OPTFLOW_FARNEBACK_GAUSSIAN)
# 계산 결과 그리기, 선언한 함수 호출 ---⑧
drawFlow(frame,flow)
# 다음 프레임을 위해 이월 ---⑨
prev = gray
cv2.imshow('OpticalFlow-Farneback', frame)
if cv2.waitKey(delay) == 27:
break
cap.release()
cv2.destroyAllWindows()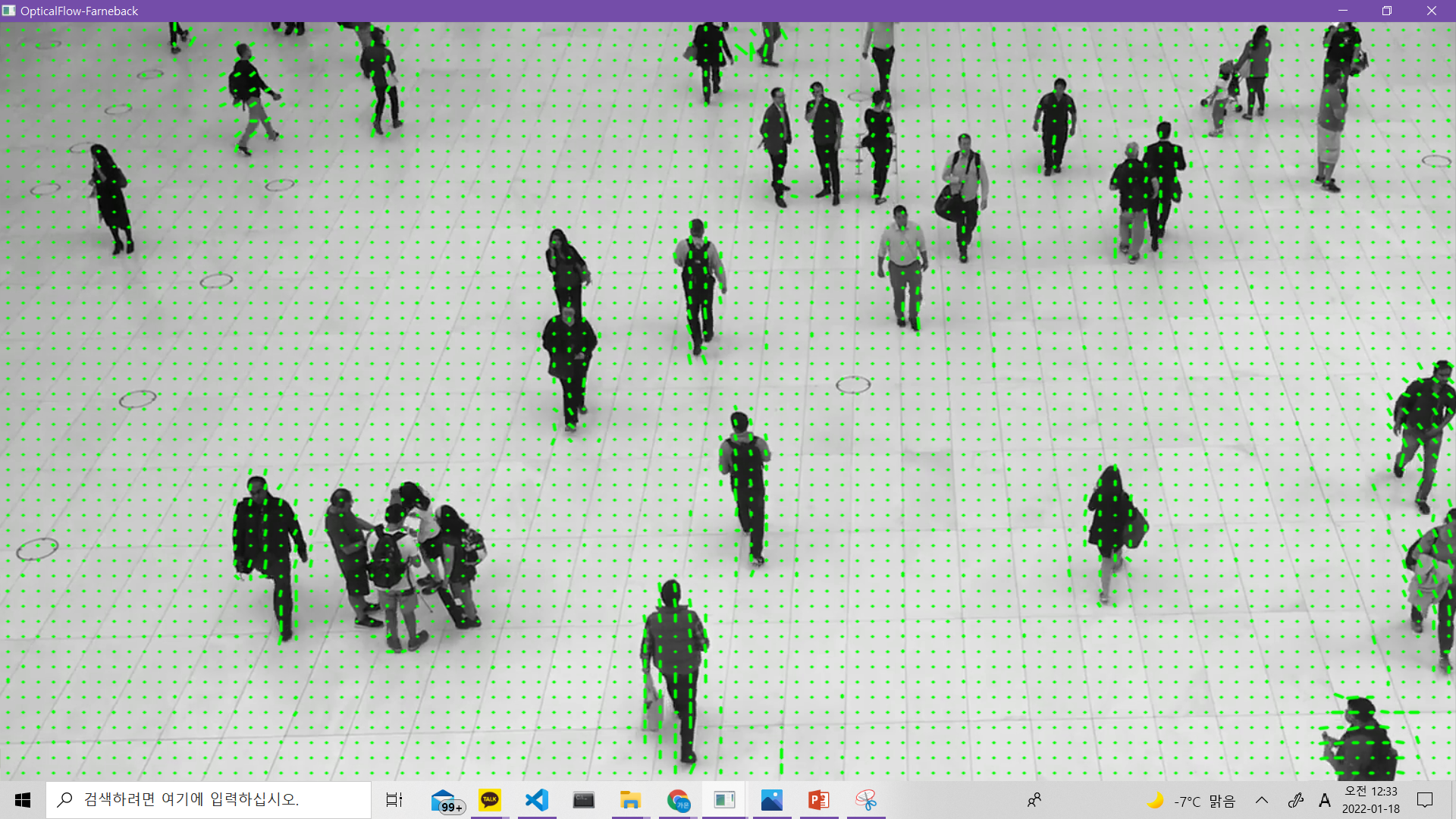
- drawFlow() 함수로 16픽셀 간격으로 격자 모양의 점을 찍음
- 각 점에서 해당하는 픽셀이 이동한 만큼 선으로 표시
- 희소 광학 흐름과 다르게 밀집 광학 흐름은 영상 전체에서 일어나는 움직임을 감지
- 왕 느리다!!!
굿
'👩💻 IoT (Embedded) > Image Processing' 카테고리의 다른 글
| [v0.35]영상처리_특징 매칭(Feature Matching) (0) | 2022.01.18 |
|---|---|
| [v0.34]영상처리_객체 추적을 위한 Tracking API (0) | 2022.01.18 |
| [v0.32]영상처리_배경 제거 (0) | 2022.01.18 |
| [v0.31]영상처리_올바른 매칭점 찾기 (0) | 2022.01.17 |
| [v0.30]영상처리_특징 매칭(Feature Matching) (0) | 2022.01.16 |



