
😎 공부하는 징징알파카는 처음이지?
[v0.35]영상처리_특징 매칭(Feature Matching) 본문
220118 작성
<본 블로그는 귀퉁이 서재님의 블로그를 참고해서 공부하며 작성하였습니다>
OpenCV - 33. HOG(Histogram of Oriented Gradient) 디스크립터
이번 포스팅에서는 HOG 디스크립터에 대해 알아보겠습니다. 이번에도 '파이썬으로 만드는 OpenCV 프로젝트(이세우 저)'를 정리했습니다. 기울기 벡터(Gradient Vectors) 기울기 벡터란 영상 내 하나의
bkshin.tistory.com
1. 기울기 벡터(Gradient Vectors)
: 기울기 벡터란 영상 내 하나의 픽셀을 기준으로 주변 픽셀에 대한 기울기를 나타내는 벡터
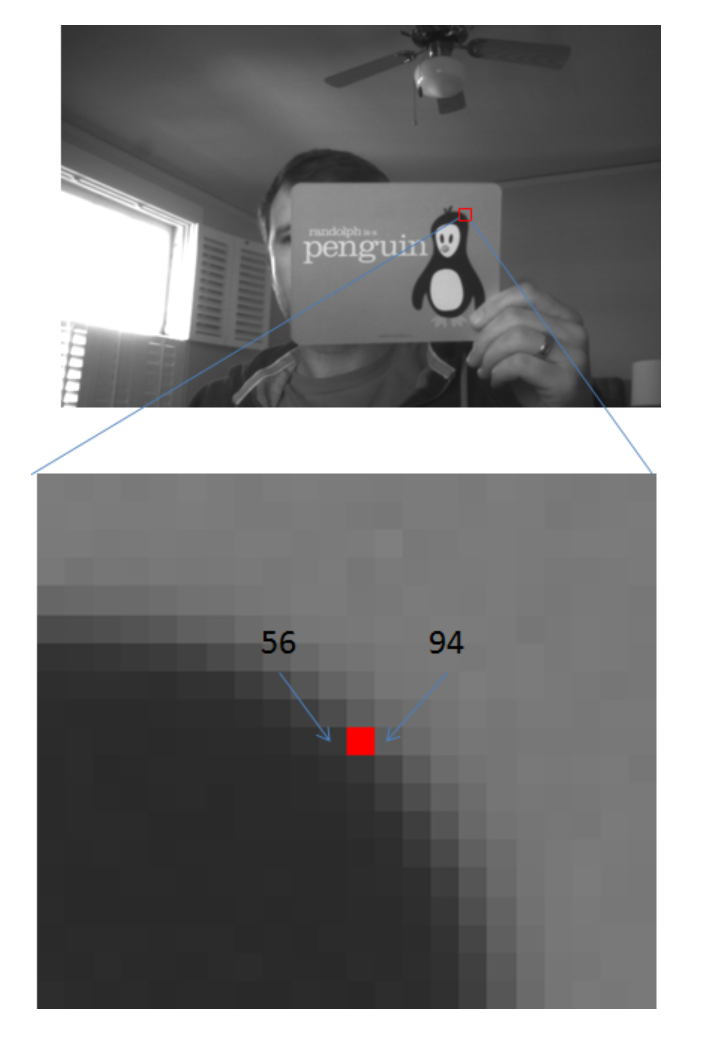
: 빨간 점으로 표시된 픽셀을 기준으로 왼쪽의 Gray Scale 값은 56이고, 오른쪽의 값은 94
: Gray Scale의 경우 0이면 검은색이고 255이면 흰색
: Gray Scale 값 94가 56보다 밝음
: 빨간 점으로 표시된 픽셀 입장에서 x축 방향의 변화량(gx)은 (94 - 56) = 38
=> 이 값이 x축 방향 기울기 변화량
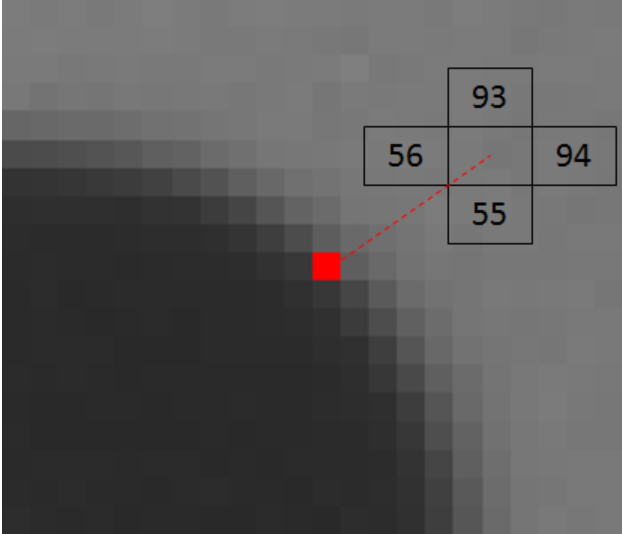
: y축 방향,, 빨간 점을 기준으로 위쪽 Gray Scale 값은 93이고, 아래쪽 값은 55
=> y축 방향의 기울기 변화량은 (93 - 55) = 38
: x축 방향 기울기 변화량, y축 방향 기울기 변화량이 모두 38
=> x축 방향 기울기 변화량, y축 방향 기울기 변화량을 함께 표현한 값이 기울기 벡터(gradient vector)
2. 픽셀(Pixels), 셀(Cells), 블록(Blocks)
픽셀 : 말 그대로 영상 내 하나의 픽셀 값을 의미
셀 : 이 픽셀들을 몇 개 묶어서 소그룹으로 만든 것
블록 : 다시 셀을 몇 개 묶어서 그룹으로 만든 것
=> 하나의 블록 안에 셀 여러 개가 있고, 하나의 셀 안에 픽셀 여러 개가 있음
3. HOG(Histogram of Oriented Gradient)
: HOG는 보행자 검출을 위해 만들어진 특징 디스크립터
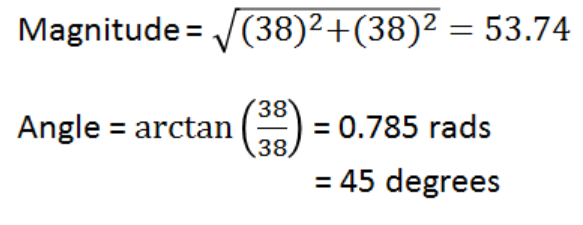
: HOG는 이미지 경계의 기울기 벡터 크기(magnitude)와 방향(direction)을 히스토그램으로 나타내 계산
: HOG 디스크립터를 만들기 위해서는 영상 속에서 검출하고자 하는 영역을 자름
: 잘라낸 영역을 윈도(window)
import cv2
import numpy as np
img = cv2.imread('img/jk.jpg')
img = np.float32(img) / 255.0
gx = cv2.Sobel(img, cv2.CV_32F, 1, 0)
gy = cv2.Sobel(img, cv2.CV_32F, 0, 1)
magnitude, angle = cv2.cartToPolar(gx, gy)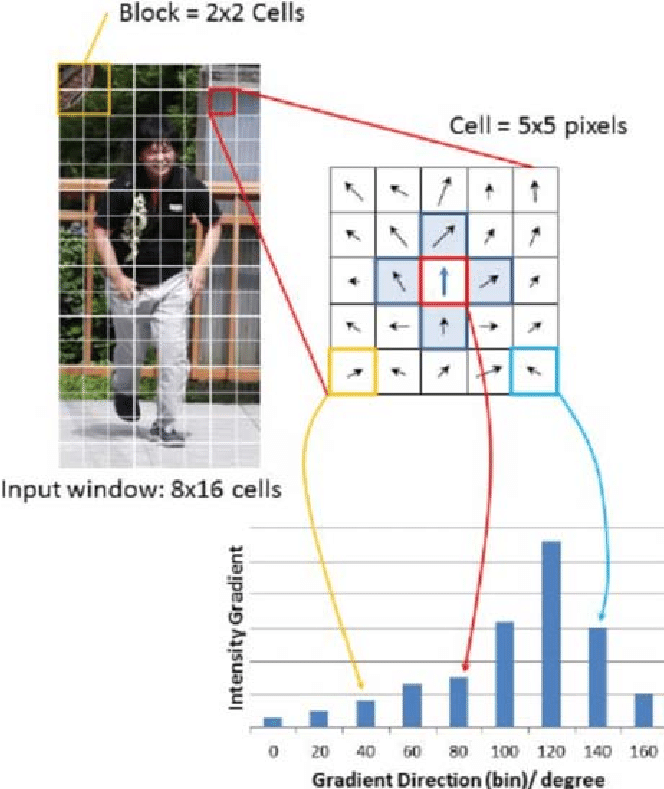
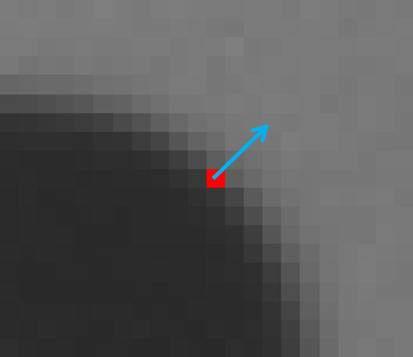
: 각 픽셀을 기준으로 기울기 벡터를 구해야함
: 화살표로 표시된 것이 기울기 벡터입
: 기울기 벡터의 크기와 방향을 히스토그램으로 나타낸 것
: 기울기 벡터의 방향을 계급(bin)으로 하고 크기를 값으로 누적한 히스토그램
: 계급(bin)은 180도를 20도씩 총 9개의 구간으로 나누어 사
: 360도가 아닌 180도로 하는 이유는 기울기의 양수와 음수가 같은 방향을 나타냄
: 윈도 전체를 하나의 히스토그램으로 계산하는 것이 아니라 하나의 셀을 기준으로 히스토그램을 계산
: 히스토그램 계산을 마치면 정규화(normalization) 과정을 거치기
: 경계 값 기울기는 밝기에 민감 => 민감성을 없애주려고 정규화
: 정규화를 적용하려면 윈도를 특정 크기로 나누기 => 나누는 영역을 블록(block)
: 블록 크기는 일반적으로 셀 크기의 2배
: 각 블록은 전체 윈도를 순회하면서 정규화 => 겹치는 부분이 발생하는데 이 부분을 블록 스트라이드(blcok stride)
=> 원본 영상에서 보행자에 해당하는 부분을 자른 영역을 윈도(window)
=> 사람을 검출할 때는 보통 64 x 128 크기로 윈도를 정함
=> 자른 윈도에서 각 픽셀에 대해 기울기 벡터를 구함
=> 특정 영역을 중심으로 기울기 벡터 크기와 방향에 대한 히스토그램을 구함
=> 히스토그램을 계산하기 위한 영역을 셀(cell) 셀은 보통 8 x 8 크기
=> 히스토그램을 계산한 뒤 정규화
=> 정규화하려면 윈도를 다시 잘게 나누어야 하는데, 이를 블록(block)
=> 블록 크기는 대게 셀 크기의 2배, 블록은 전체 윈도를 순회하면서 정규화하는데
=> 블록이 한번에 이동하는 거리를 블록 스트라이드(block stride)
4. HOG 디스크립터를 활용한 보행자 인식
descriptor = cv2.HOGDescriptor(winSize, blockSize, blockStride, cellSize, nbins)
: HOG 디스크립터 추출기 생성
: 미리 훈련된 SVM 모델(pretrained SVM model)을 전달받아 보행자를 추출 가능
- winSize : 윈도 크기, HOG 추출 영역
- blockSize : 블록 크기, 정규화 영역
- blockStride : 정규화 블록 겹침 크기
- cellSize : 셀 크기, 히스토그램 계산 영역
- nbins : 히스토그램 계급 수
- descriptor : HOG 특징 디스크립터 추출기
hog = descriptor.compute(img)
: HOG 계산
- img : 계산 대상 이미지
- hog : HOG 특징 디스크립터 결과
+ 보행자 인식을 위한 사전 훈련 API를 제공
scvmdetector = cv2.HOGDescriptor_getDefaultPeopleDetector() : 64 x 128 윈도 크기로 훈련된 모델
scvmdetector = cv2.HOGDescriptor_getDaimlerPeopleDetector() : 48 x 96 윈도 크기로 훈련된 모델
descriptor = cv2.HOGDescriptor(winSize, blockSize, blockStride, cellSize, nbins) : HOG 생성
descriptor.setSVMDetector(svmdetector) : 훈련된 SVM 모델 설정
rects, weights = descriptor.detectMultiScale(img) : 객체 검출
- img : 검출하고자 하는 이미지
- rects : 검출된 결과 영역 좌표 N x 4 (x, y, w, h)
- weights : 검출된 결과 계수 N x 1
# HOG-SVM 보행자 검출
import cv2
# default 디덱터를 위한 HOG 객체 생성 및 설정--- ①
hogdef = cv2.HOGDescriptor()
hogdef.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())
# dailer 디덱터를 위한 HOG 객체 생성 및 설정--- ②
hogdaim = cv2.HOGDescriptor((48,96), (16,16), (8,8), (8,8), 9)
hogdaim.setSVMDetector(cv2.HOGDescriptor_getDaimlerPeopleDetector())
cap = cv2.VideoCapture('img/walking.mp4')
mode = True # 모드 변환을 위한 플래그 변수
print('Toggle Space-bar to change mode.')
while cap.isOpened():
ret, img = cap.read()
if ret :
if mode:
# default 디텍터로 보행자 검출 --- ③
found, _ = hogdef.detectMultiScale(img)
for (x,y,w,h) in found:
cv2.rectangle(img, (x,y), (x+w, y+h), (0,255,255))
else:
# daimler 디텍터로 보행자 검출 --- ④
found, _ = hogdaim.detectMultiScale(img)
for (x,y,w,h) in found:
cv2.rectangle(img, (x,y), (x+w, y+h), (0,255,0))
cv2.putText(img, 'Detector:%s'%('Default' if mode else 'Daimler'), \
(10,50 ), cv2.FONT_HERSHEY_DUPLEX,1, (0,255,0),1)
cv2.imshow('frame', img)
key = cv2.waitKey(1)
if key == 27:
break
elif key == ord(' '):
mode = not mode
else:
break
cap.release()
cv2.destroyAllWindows()

- Default 보행자 검출기와 Daimler 보행자 검출기를 이용해 보행자를 검출
- 스페이스 바를 누르면 검출기 변경 가능
- 노란색 박스로 보행자를 인식한 게 Default 보행자 검출기
- 초록색 박스로 보행자를 인식한 게 Daimler 보행자 검출기
- Default 보행자 검출기는 불필요한 검출이 적은 대신 멀리 있는 작은 보행자는 검출하지 못함
- Daimler 보행자 검출기는 멀리 있는 작은 보행자도 검출하지만 삼각대나 건물 그림자도 보행자로 인식
와우~ 동영상넘나 느리당
크기가 커서 많이 잘린다 ㅜㅡㅜ
'👩💻 IoT (Embedded) > Image Processing' 카테고리의 다른 글
| 2D 영상처리와 3D 영상처리 (0) | 2022.10.18 |
|---|---|
| 1. 베이즈 확률로 위치 예측하기 “실종된 난파선 선원을 찾아라” (0) | 2022.10.17 |
| [v0.34]영상처리_객체 추적을 위한 Tracking API (0) | 2022.01.18 |
| [v0.33]영상처리_광학 흐름(Optical Flow) (0) | 2022.01.18 |
| [v0.32]영상처리_배경 제거 (0) | 2022.01.18 |



