
😎 공부하는 징징알파카는 처음이지?
[DEEPNOID 원포인트레슨]_7_Object Detection 2 본문
220127 작성
<본 블로그는 DEEPNOID 원포인트레슨을 참고해서 공부하며 작성하였습니다>
인공지능 | Deepnoid
DEEPNOID는 인공지능을 통한 인류의 건강과 삶의 질 향상을 기업이념으로 하고 있습니다. 딥노이드가 꿈꾸는 세상은, 의료 인공지능이 지금보다 훨씬 넓은 범위의 질환의 연구, 진단, 치료에 도움
www.deepnoid.com
1. Classification
1) Classification
: feature Extractor -> classifier
2) Object Detection
3) Instance Segmentation
: Semantic VS Instance Segmentation
: input -> pixelwise classification -> probability map -> threshold
2. One stage VS Multi Stage Detection
1) One stage
Feature Extraction -> Region proposal -> Classifiction -> Box Regression -> semantic, Instance Segmentation
2) YOLO, SSD
Feature Extraction -> Classifiction -> Box Regression
=> Yolo는 7x7 grid 하나
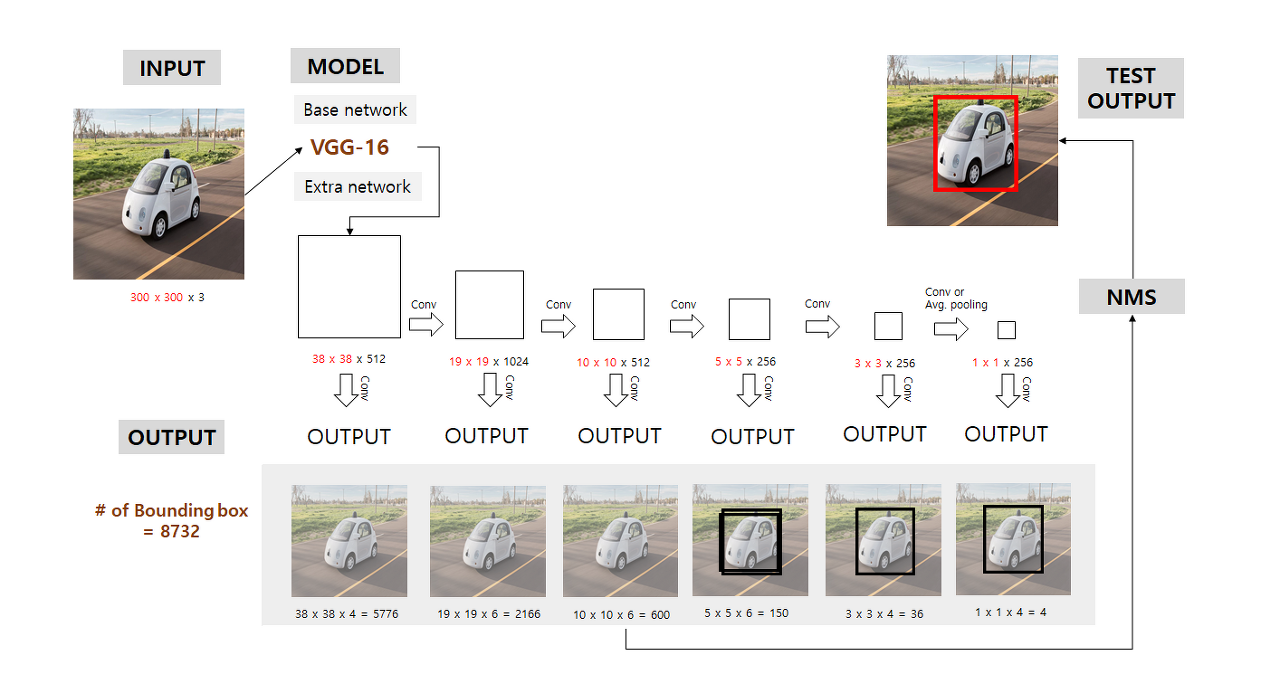
=> SSD는 전체 이미지를 38x38, 19x19, 10x10, 5x5, 3x3, 1x1의 그리드로 나누고 output과 연결
3. Comparision
- Multi Stage
: Backbone Network 로 추출한 Feature 를 각각의 목적에 맞는 작은 신경망으로 class scoring, box coordinate 따로 획득
: Object 검출 성능, class 분류 뛰어남
- One Stage
: Backbone Network 로 추출한 Feature 를 각각의 목적에 맞는 작은 신경망으로 class scoring, box coordinate 한번에 획득
: Object 검출 성능, class 분류 상대적으로 떨어짐
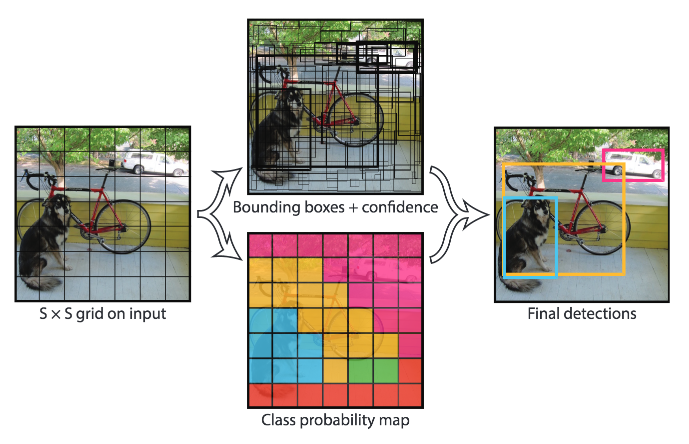
4. YOLO, You Only Look Once
- yolo v1
: Localization, Classification 을 하나의 Regression problem 으로 해석
: MMS로 각 ROI의 Box 를 중복 제거 후 후처리를 통한 score 획득
: 각 Grid 별로 obejct class probablity 를 계산
: 찾아낸 Box 들의 중심점 좌표, 높낮이, class socre을 통해 ground truth와 prediction 간의 차이를 계산하도록 손실 함수 구성하고 이를 minimize
: 손실함수는 sum of squared error, 오차 제곱합(SSE) 이용
: BOX에 object 없으면 confidence 가 0이 되도록 penalty 부여!
- yolo v2
: Batch Normalization, 모든 conv layer 뒤에 BN 결합, 별도의 Regularizer 다 제거
: High Resolution Classifier, feature mpa 을 grid 로 사용하기 때문에 고해상도 피처맵 획득
: 입력 이미지를 416*416 로 한다
-> object 중심점을 gird 상에서 잘 찾아내기 우해
-> 대부분 데이터는 영상의 중앙에 object 위치
: Convolution with Anchor Box
: Dimension Clustering
: Object Detection Task 에서 Recall 의미
-> 실제 obejct의 위치를 예측한 비율이 높음 의미
: Fine-Grained Feature
-> 최종 feature map 크기 13*13은 큰 obejct 검출엔 충분하지만 작은 object 검출엔 불충분
-> 26*26*512 => 13*13*2048 => stacking => 13*13*3072
: VGGNet 의 3*3 filter 사용
- yolo v3
: feature pyramid Network
- yolo v4
: 높은 정확도와 빠른 Detectin 속도 확보
5. Single-shot Detector
: 작은 object 정확하게 검출
: 다양한 scale의 feature map을 획득하기 위해 보조 신경망 사용
: 서로 다른 scale의 feature map 별로 각각 다른 형태 anchor box 사용
: YOLO v1 단점은 최종 feature map 만으로 grid 구성해서 사용
'👩💻 인공지능 (ML & DL) > ML & DL' 카테고리의 다른 글
| [Deep Learning]_1_머신러닝 수학 (0) | 2022.01.28 |
|---|---|
| [DEEPNOID 원포인트레슨]_8_Reinforcement Learning (0) | 2022.01.27 |
| [DEEPNOID 원포인트레슨]_6_Segmentation 1. U-Net, attention (0) | 2022.01.26 |
| [DEEPNOID 원포인트레슨]_5_Detection 1. RCNN (0) | 2022.01.26 |
| [DEEPNOID 원포인트레슨]_4_Classifcation 2. MobileNet & EfficientNet (0) | 2022.01.26 |


