
😎 공부하는 징징알파카는 처음이지?
[자동차 뒷편에 LCD판으로 상황 전달하기 5] client 에서 받은 message 를 serial 통신 통해 arduino 로 전송 by.termios 본문
👩💻 IoT (Embedded)/Arduino
[자동차 뒷편에 LCD판으로 상황 전달하기 5] client 에서 받은 message 를 serial 통신 통해 arduino 로 전송 by.termios
징징알파카 2023. 11. 10. 12:12728x90
반응형
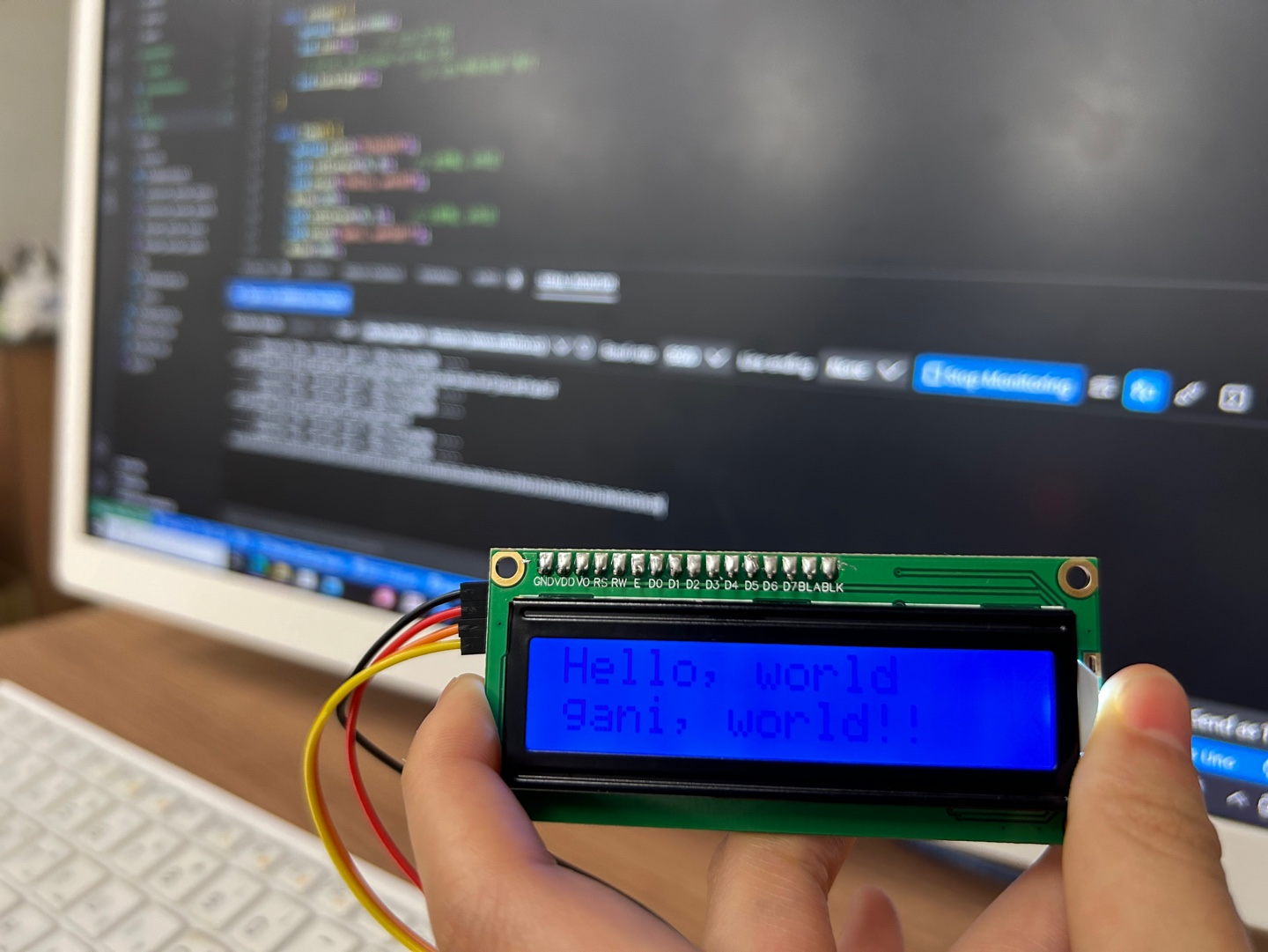
⭐ client 에서 받은 message 를 serial 통신 통해 arduino 로 전송
⭐ server.c
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <arpa/inet.h>
#include <sys/socket.h>
#define BUF_SIZE 16
void error_handling(char *message);
int main(int argc, char *argv[])
{
// 서버, 클라이언트 소켓 파일디스크립터 변수 선언
int serv_sock, clnt_sock;
char message[BUF_SIZE];
int str_len, i;
// sockaddr_in 구조체 변수 선언
struct sockaddr_in serv_adr, clnt_adr;
socklen_t clnt_adr_sz;
if(argc != 2)
{
printf("Usage : %s <port>\n", argv[0]);
exit(1);
}
// ----------- 1. Create socket object ------------------
// socket() : socket 생성 & socket discriptor
serv_sock = socket(PF_INET, SOCK_STREAM, 0);
if(serv_sock == -1)
error_handling("socket() error");
// ----------- 2. Bind the socket file ------------------
// serv_sock에 bind 로 주소 넣기 위한 밑작업
memset(&serv_adr, 0, sizeof(serv_adr));
// Prepare the address
serv_adr.sin_family = AF_INET; // type : IPv4
serv_adr.sin_addr.s_addr = htonl(INADDR_ANY); // ip주소
serv_adr.sin_port = htons(atoi(argv[1])); // 포트번호
// bind()로 서버 소켓에 주소정보 할당
if(bind(serv_sock, (struct sockaddr*)&serv_adr, sizeof(serv_adr)) == -1)
error_handling("bind() error");
// ----------- 3. Prepare backlog ------------------
// listen()으로 서버소켓으로 오는 클라이언트 요청 대기
if(listen(serv_sock, 5) == -1)
error_handling("listen() error");
clnt_adr_sz = sizeof(clnt_adr);
for(i = 0; i < 5; i++)
{
printf("Listen....\n");
// ----------- 4. Start accepting clients ---------
// 클라이언트 접속 요청 대기 및 수락, 클라이언트와의 통신을 위한 새 socket 생성
clnt_sock = accept(serv_sock, (struct sockaddr*)&clnt_adr, &clnt_adr_sz);
if(clnt_sock == -1)
error_handling("accept() error");
else
printf("Connected client %d \n", i + 1);
// 클라이언트로부터 전송된 자료 수신
// read(int fd, void *buff, size_t nbytes)
while((str_len = read(clnt_sock, message, BUF_SIZE)) != 0)
// 클라이언트로 자료 송신
// write(int fd, const void *buf, size_t nbytes);
write(clnt_sock, message, str_len);
// 통신을 완료하면 socket 을 소멸
close(clnt_sock);
}
// 통신을 완료하면 socket 을 소멸
close(serv_sock);
return 0;
}
void error_handling(char *message)
{
fputs(message, stderr);
fputc('\n', stderr);
exit(1);
}⭐ client.c
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <arpa/inet.h>
#include <sys/socket.h>
#include <fcntl.h>
#include <termios.h>
#define BUF_SIZE 16
void error_handling(char *message);
typedef struct
{
// 파일 디스크립터 : 어떠한 통신 포트를 열었을 때 컴퓨터가 찾아가기 쉽게 정수로 숫자 매김
int fd;
} SerialPort;
// device : 열고 싶은 시리얼 포트의 이름
int serial_open(SerialPort *port, const char *device)
{
// open : 문자열로 선언된 경로(device)를 받아서 파일 디스크립터(fd)로 반환하는 함수
port->fd = open(device, O_RDWR | O_NOCTTY | O_NDELAY);
if (port->fd == -1)
{
perror("Unable to open port");
return -1;
}
// 시리얼 통신 환경을 설정하기 위해 termios 구조체를 선언
struct termios options;
memset(&options, 0, sizeof(options));
// 시리얼 포트 초기화
tcflush(port->fd, TCIFLUSH);
// Terminer Control 모드 설정을 위해서 Get
tcgetattr(port->fd, &options);
cfsetispeed(&options, B9600); // Set baud rate to 9600 (adjust as needed)
cfsetospeed(&options, B9600);
options.c_cflag |= CS8; // 8 data bits -> 문자 크기 마스크
options.c_cflag &= ~PARENB; // No parity -> PARENB : 출력 시 패리티 생성을 활성화하고 입력
options.c_cflag &= ~CSTOPB; // One stop bit -> CSTOPB : Stop bit 수 1개
// options.c_cflag &= ~CSIZE; // Mask the character size bits
// Serial Port에 새 설정 Set
// 시리얼 포트에 설정 입력 (TCSANOW : 즉시 속성을 변경시켜라)
tcsetattr(port->fd, TCSANOW, &options);
return 0;
}
void serial_close(SerialPort *port)
{
close(port->fd);
port->fd = -1;
}
int serial_read(SerialPort *port, char *buffer, size_t size)
{
// Serial Port로부터 데이터 수신
// read에 의해서 실제로 읽혀진 문자의 개수를 갖게 됨
return read(port->fd, buffer, size);
}
ssize_t serial_write(SerialPort *port, char *buffer, size_t size)
{
// Serial Port으로 데이터 송신
return write(port->fd, buffer, size);
}
int main(int argc, char *argv[])
{
int sock;
char message[BUF_SIZE] = {0, };
int str_len;
// sockaddr_in 구조체 변수 선언
struct sockaddr_in serv_adr;
if (argc != 3)
{
printf("Usage : %s <IP> <port> \n", argv[0]);
exit(1);
}
// ----------- 1. Create socket object ------------------
// socket() : socket 생성 & socket discriptor
sock = socket(PF_INET, SOCK_STREAM, 0);
if (sock == -1)
error_handling("socket() error");
// serial port
SerialPort port;
if (serial_open(&port, "/dev/ttyACM0") == -1)
{
return -1;
}
// ------------ 2. Connect to server-- ------------------
// serv_sock에 bind 로 주소 넣기 위한 밑작업
memset(&serv_adr, 0, sizeof(serv_adr));
// Prepare the address
serv_adr.sin_family = AF_INET; // type : IPv4
serv_adr.sin_addr.s_addr = inet_addr(argv[1]); // ip주소
serv_adr.sin_port = htons(atoi(argv[2])); // 포트번호
// 대상 서버 소켓에 주소 할당
// 주소 정보에 서버의 주소와 포트 번호를 지정하고 서버와 연결 시도
if (connect(sock, (struct sockaddr *)&serv_adr, sizeof(serv_adr)) == -1)
error_handling("connect() error!");
else
puts("Connect........");
while (1)
{
fputs("Input message(Q to quit) : ", stdout);
fgets(message, BUF_SIZE, stdin);
if (!strcmp(message, "q\n") || !strcmp(message, "Q\n"))
break;
// 클라이언트로 자료를 송신한다
// write(int fd, const void *buf, size_t nbytes);
write(sock, message, strlen(message));
// 클라이언트로부터 전송된 자료 수신한다
// read(int fd, void *buff, size_t nbytes)
str_len = read(sock, message, BUF_SIZE - 1);
message[str_len] = 0;
printf("Message form server : %s", message);
// serial port 로 message 전달
serial_write(&port, message, sizeof(message));
}
// 통신 포트를 닫아 사용을 중지
serial_close(&port);
close(sock);
return 0;
}
void error_handling(char *message)
{
fputs(message, stderr);
fputc('\n', stderr);
exit(1);
}728x90
반응형
'👩💻 IoT (Embedded) > Arduino' 카테고리의 다른 글
| [자동차 뒷편에 LCD판으로 상황 전달하기 7] 완성본 (0) | 2023.11.10 |
|---|---|
| [자동차 뒷편에 LCD판으로 상황 전달하기 6] 조이스틱 x, y 4분할 해서 led 불 켜기 (0) | 2023.11.10 |
| [자동차 뒷편에 LCD판으로 상황 전달하기 4] Joystick button 마다 lcd 출력 (0) | 2023.11.10 |
| [자동차 뒷편에 LCD판으로 상황 전달하기 3] 리눅스 시리얼 통신 (termios.h) (0) | 2023.11.10 |
| [자동차 뒷편에 LCD판으로 상황 전달하기 2] TCP/IP 통신 함수 사용 순서 (0) | 2023.11.10 |
'👩💻 IoT (Embedded)/Arduino' Related Articles
more




Comments