
😎 공부하는 징징알파카는 처음이지?
ultrasonic sensor 로 모니터링 하기 with processing 본문
728x90
반응형
<본 블로그는 Harsh Sharma 유튜브를 참고해서 공부하며 작성하였습니다 :-)>
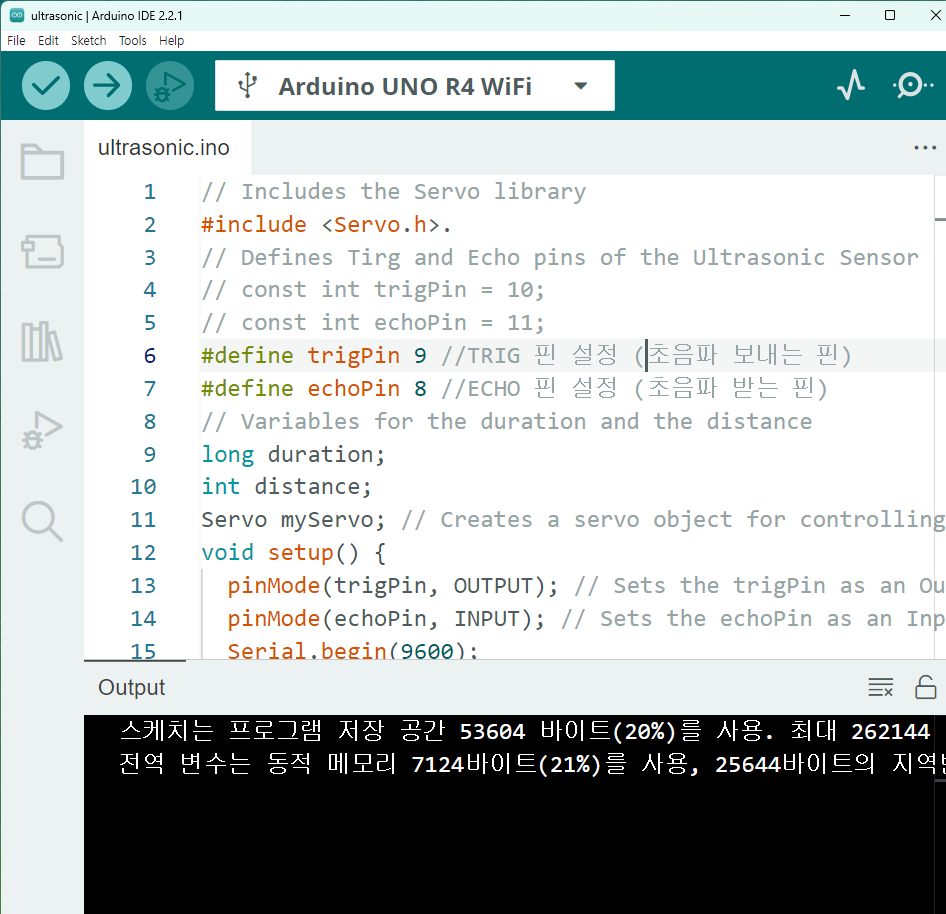
⭐ ultrasonic sensor 와 Servo motor
// Includes the Servo library
#include <Servo.h>.
// Defines Tirg and Echo pins of the Ultrasonic Sensor
#define trigPin 9 //TRIG 핀 설정 (초음파 보내는 핀)
#define echoPin 8 //ECHO 핀 설정 (초음파 받는 핀)
// Variables for the duration and the distance
long duration;
int distance;
Servo myServo; // Creates a servo object for controlling the servo motor
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600);
myServo.attach(12); // Defines on which pin is the servo motor attached
}
void loop() {
// rotates the servo motor from 15 to 165 degrees
for(int i=15;i<=165;i++){
myServo.write(i);
delay(30);
distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree
Serial.print(i); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
}
// Repeats the previous lines from 165 to 15 degrees
for(int i=165;i>15;i--){
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(",");
Serial.print(distance);
Serial.print(".");
}
}
// Function for calculating the distance measured by the Ultrasonic sensor
int calculateDistance(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
distance= duration*0.034/2;
return distance;
}
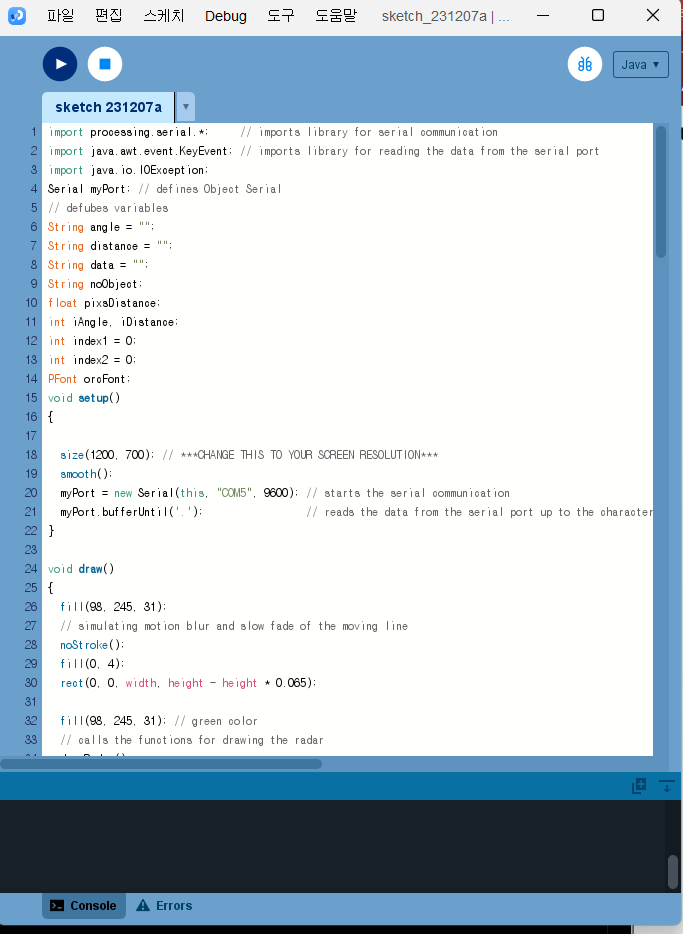
⭐ processing
여기서 다운 받은 processing 앱으로 코드 실행 시켜야함
https://processing.org/download
import processing.serial.*; // imports library for serial communication
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle = "";
String distance = "";
String data = "";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1 = 0;
int index2 = 0;
PFont orcFont;
void setup()
{
size(1200, 700); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION***
smooth();
myPort = new Serial(this, "COM5", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
}
void draw()
{
fill(98, 245, 31);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0, 4);
rect(0, 0, width, height - height * 0.065);
fill(98, 245, 31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent(Serial myPort)
{ // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0, data.length() - 1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle = data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance = data.substring(index1 + 1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar()
{
pushMatrix();
translate(width / 2, height - height * 0.074); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98, 245, 31);
// draws the arc lines
arc(0, 0, (width - width * 0.0625), (width - width * 0.0625), PI, TWO_PI);
arc(0, 0, (width - width * 0.27), (width - width * 0.27), PI, TWO_PI);
arc(0, 0, (width - width * 0.479), (width - width * 0.479), PI, TWO_PI);
arc(0, 0, (width - width * 0.687), (width - width * 0.687), PI, TWO_PI);
// draws the angle lines
line(-width / 2, 0, width / 2, 0);
line(0, 0, (-width / 2) * cos(radians(30)), (-width / 2) * sin(radians(30)));
line(0, 0, (-width / 2) * cos(radians(60)), (-width / 2) * sin(radians(60)));
line(0, 0, (-width / 2) * cos(radians(90)), (-width / 2) * sin(radians(90)));
line(0, 0, (-width / 2) * cos(radians(120)), (-width / 2) * sin(radians(120)));
line(0, 0, (-width / 2) * cos(radians(150)), (-width / 2) * sin(radians(150)));
line((-width / 2) * cos(radians(30)), 0, width / 2, 0);
popMatrix();
}
void drawObject()
{
pushMatrix();
translate(width / 2, height - height * 0.074); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255, 10, 10); // red color
pixsDistance = iDistance * ((height - height * 0.1666) * 0.025); // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if (iDistance < 40)
{
// draws the object according to the angle and the distance
line(pixsDistance * cos(radians(iAngle)), -pixsDistance * sin(radians(iAngle)), (width - width * 0.505) * cos(radians(iAngle)), -(width - width * 0.505) * sin(radians(iAngle)));
}
popMatrix();
}
void drawLine()
{
pushMatrix();
strokeWeight(9);
stroke(30, 250, 60);
translate(width / 2, height - height * 0.074); // moves the starting coordinats to new location
line(0, 0, (height - height * 0.12) * cos(radians(iAngle)), -(height - height * 0.12) * sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}
void drawText()
{ // draws the texts on the screen
pushMatrix();
if (iDistance > 40)
{
noObject = "Out of Range";
}
else
{
noObject = "In Range";
}
fill(0, 0, 0);
noStroke();
rect(0, height - height * 0.0648, width, height);
fill(98, 245, 31);
textSize(25);
text("10cm", width - width * 0.3854, height - height * 0.0833);
text("20cm", width - width * 0.281, height - height * 0.0833);
text("30cm", width - width * 0.177, height - height * 0.0833);
text("40cm", width - width * 0.0729, height - height * 0.0833);
textSize(40);
text("Best Safety Subway ", width - width * 0.875, height - height * 0.0277);
text("Angle: " + iAngle + " °", width - width * 0.5, height - height * 0.0277);
text("Distance: ", width - width * 0.3, height - height * 0.0277);
if (iDistance < 40)
{
text(" " + iDistance + " cm", width - width * 0.225, height - height * 0.0277);
}
textSize(25);
fill(98, 245, 60);
translate((width - width * 0.4994) + width / 2 * cos(radians(30)), (height - height * 0.0907) - width / 2 * sin(radians(30)));
rotate(-radians(-60));
text("30°", 0, 0);
resetMatrix();
translate((width - width * 0.503) + width / 2 * cos(radians(60)), (height - height * 0.0888) - width / 2 * sin(radians(60)));
rotate(-radians(-30));
text("60°", 0, 0);
resetMatrix();
translate((width - width * 0.507) + width / 2 * cos(radians(90)), (height - height * 0.0833) - width / 2 * sin(radians(90)));
rotate(radians(0));
text("90°", 0, 0);
resetMatrix();
translate(width - width * 0.513 + width / 2 * cos(radians(120)), (height - height * 0.07129) - width / 2 * sin(radians(120)));
rotate(radians(-30));
text("120°", 0, 0);
resetMatrix();
translate((width - width * 0.5104) + width / 2 * cos(radians(150)), (height - height * 0.0574) - width / 2 * sin(radians(150)));
rotate(radians(-60));
text("150°", 0, 0);
popMatrix();
}
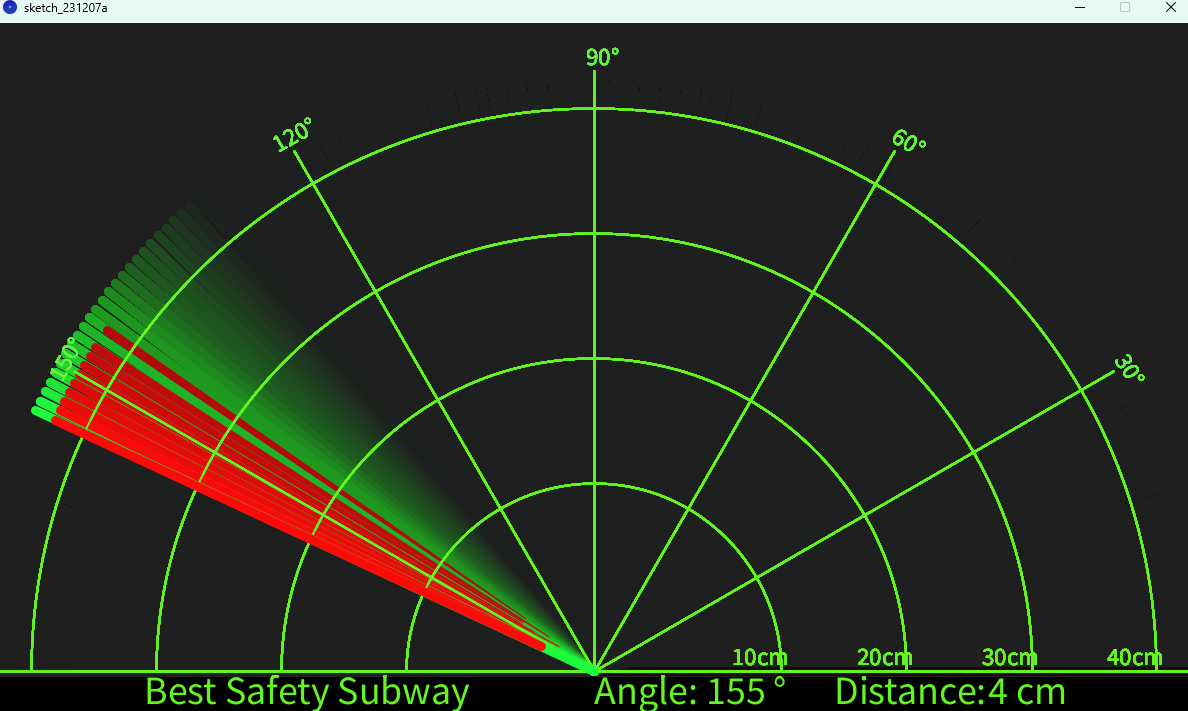
⭐ 실행 결과
먼저 ino 부터 upload 해준다
그다음 processing 앱에서 java 코드를 실행시킨다
728x90
반응형
'👩💻 IoT (Embedded) > Arduino' 카테고리의 다른 글
| [BSS 안전하고 깨끗한 지하철 탑승 및 운행 1] MQTT 사용해서 topic 으로 SUB/PUB 구현하기 ver.local (0) | 2023.12.22 |
|---|---|
| Floating(플로팅)값 이란? (0) | 2023.12.15 |
| CAN (Controller Area Network) 이란? with Arduino UNO R4 WIFI (0) | 2023.11.30 |
| 실시간(Real Time) 운영체제(OS) 의 RTOS와 FreeRTOS 사용해보기 (0) | 2023.11.29 |
| [UNO R4 WIFI example] Digital-to-Analog Converter (DAC) (0) | 2023.11.28 |
'👩💻 IoT (Embedded)/Arduino' Related Articles
more



Comments